说在前面
算法应该是大二上我学的最轻松的一门课了,我有一个完美的开始和一个完美的结束——尽管中间一度每周打算签完到就不做了,非常感谢狗头学长的板子(C++算法板子积累 - Only(AR) 的编程日记),也特别感谢各位助教对我的帮助。下面的板子转pdf打印出来大概有90多页,虽然大部分都用不上,但是!有总比没有好嘛——
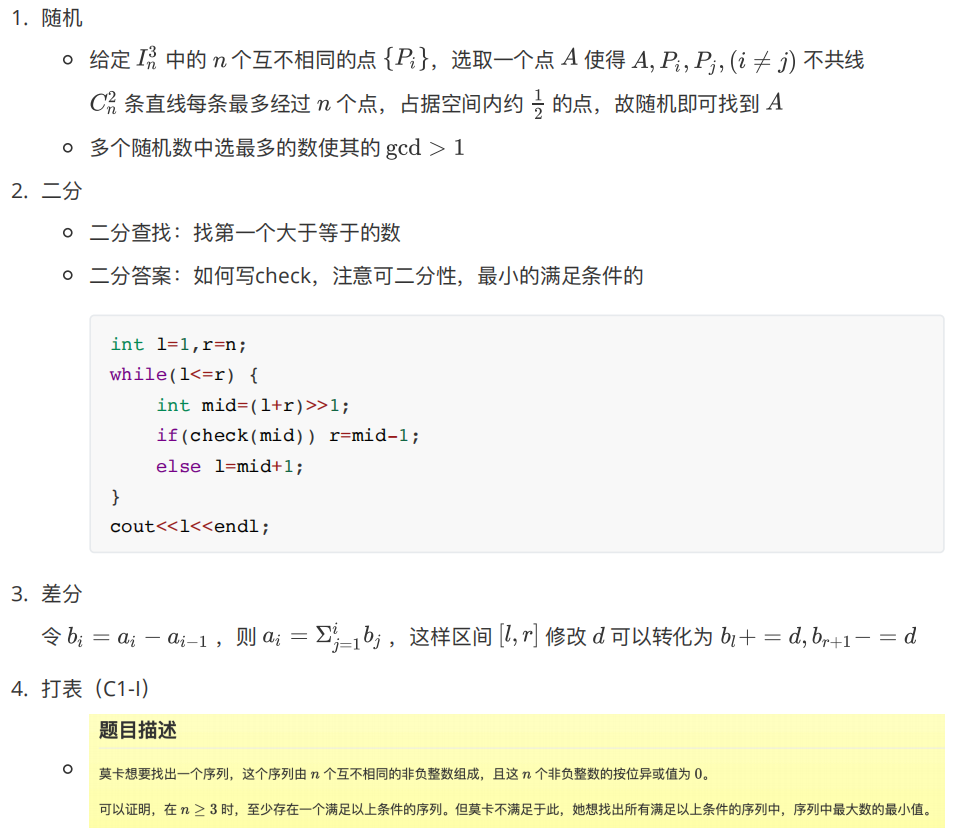
Tips
图论
- 重边:最短路记得判断,只存最短的边
- 负环?负边权?
- 有重边的情况下判断负环:有负数就存负数,负数越小越好;否则存正数,正数越大越好
- 最短路径
- 单源最短路径:一个点到其他任意点的最短路径
- Bellman-Ford算法:时间
- 有向无环图中的单源最短路径问题:时间
- Dijkstra算法:时间
- Bellman-Ford算法:时间
- 所有结点对的最短路径问题:所有点到所有点的最短路径
- floyd算法:时间
- floyd算法:时间
- 特别地,可以用BFS求无权图最短路径
- 单源最短路径:一个点到其他任意点的最短路径
- 最大流:在一个流网络中,找到从源点到汇点的最大流量。流网络是一个有向图,每条边有一个容量限制,表示通过该边的最大流量。
- Edmonds-Karp算法:时间
- Dinic算法:时间
- Edmonds-Karp算法:时间
- 最大二分匹配:在二分图中找到最大的匹配数。二分图是一种特殊的图,其节点可以分为两个互不相交的集合,使得每条边都连接这两个不同集合中的节点。
- Dinic最小割/最大流算法:时间
- 匈牙利算法:时间
- Dinic最小割/最大流算法:时间
- 最小生成树:在连通加权图中,找到一棵包含所有节点的树,使得树中所有边的权重之和最小。目的是找到连接所有顶点的最小总权重的边集。不关心顶点之间的具体路径长度,只关心整体结构的权重最小。
- Prim:时间 朴素版
- Kruskal:时间
- Prim:时间 朴素版
- 有向无环图
做题思想/技巧
注意事项
- 在对接近 0 的负数四舍五入时应输出
0.00而非-0.00:fabs(a) < 0.005时输出0.00 - 快速读写
//快读
inline ll read(){
ll s=0,w=1;
char ch=getchar();
while(ch<'0'||ch>'9'){if(ch=='-')w=-1;ch=getchar();}
while(ch>='0'&&ch<='9') s=s*10+ch-'0',ch=getchar();
return s*w;
}
//快写
inline void out(ll a){
if(a>=10)out(a/10);
putchar(a%10+'0');
}
int main(){
ll n;
n=read();
out(n);
return 0;
}
- 数组大小
如无向图双倍空间,FFT四倍空间
空间计算sizeof,如下方法计算 数组所占空间(KB):cout << sizeof a/1024 - corner case
几何中斜率为0 - 初始化
- 多测清空,不要滥用
memset
memset(a, 0, sizeof(int)*(n+1));正确
memset(a, 0, sizeof a);超时
以及memset初始化最大值 应为memset(a, 0x3f, sizeof(int) * (n+1)); - long long
- cin和cout关闭同步流(但关闭后不能用scanf printf等c语言的输入输出)
ios::sync_with_stdio(false) - cin, cout时用 '\n' 代替 endl
- 数组是否够大
- 浮点数误差:如几何求面积能否直接用整数计算
- 不要用gets!!!!!!!!!!!!!!!!!!
- int max: 2147483647, which is 2^31 - 1
int min: -2147483648, which is -2^31
long long max: 9223372036854775807, which is 2^63 - 1
long long min: -9223372036854775808, which is -2^63 - 一些最大值最小值
用climits头文件INT_MAXINT_MINLLONG_MAXLLONG_MIN
#include <iostream>
#include <climits>
int main() {
// 打印整型的最大值和最小值
std::cout << "int 的最大值是:" << INT_MAX << std::endl;
std::cout << "int 的最小值是:" << INT_MIN << std::endl;
// 打印长整型的最大值和最小值
std::cout << "long long 的最大值是:" << LLONG_MAX << std::endl;
std::cout << "long long 的最小值是:" << LLONG_MIN << std::endl;
return 0;
}
cppStart
#include <iostream>
#include <algorithm>
#include <cmath>
#include <string>
#include <vector>
#include <queue>
#include <stack>
#include <set>
#include <climits>
using namespace std;
int main() {
return 0;
}
标准库
- 能按索引访问元素的容器:
vector - 能遍历的容器:
vector,set,multiset
vector(向量): 动态数组;当需要随机访问元素且频繁在末尾添加或删除元素时。queue(队列): FIFO的数据结构;当需要按照添加顺序处理元素时,如广度优先搜索(BFS)。priority_queue(优先队列): 自动排序;当需要处理具有优先级的任务时,如最小生成树算法(Prim’s)或处理事件驱动的系统。stack(栈): LIFO;当需要后进先出的处理顺序时,如深度优先搜索(DFS)、递归算法的辅助数据结构。set(集合): 自动排序,不包含重复元素;当需要存储唯一元素并经常进行查找操作时,如去重、集合运算。multiset(多重集合): 与set类似,但允许存储重复的元素;当需要存储元素并保持有序,但元素可以重复时。
algorithm
__gcd(a, b) // 求两个数的最大公因数
__builtin_popcount(a) // 求 int 的二进制里多少个 1
is_sorted(a, a + n) // 是否升序
is_sorted_until(a, a + n) // 到哪里是升序
sort(a, a + n) // 不稳定排序(默认升序)
sort(a, a + n, greater<int>()) // 降序排序
stable_sort(a, a + n) // 稳定排序
nth_element(a, a + k, a + n) // 将第 k 大元素放到 a[k]
unique(begin, end) // 对有序数组去重,返回末尾地址(去除的是相邻的重复元素,所以使用前需先排序)
max(a, b) // 返回较大值
min(a, b) // 返回较小值
max_element(a, a + n) // 返回最大值位置
min_element(a, a + n) // 返回最小值位置
int pos1 = lower_bound(a, a + n, key)-a; // 返回第一个大于等于 key 的元素的下标
int pos2 = upper_bound(a, a + n, key)-a; // 返回第一个大于 key 的元素的下标
binary_search(a, a + n, key) // 二分查找是否存在
is_heap(a, a + n) // 判断是否为大顶堆 vector<int>a; is_heap(a.begin(), a.end())
is_heap_until(a, a + n) // 到哪里是大顶堆
make_heap(a, a + n) // 区间建堆 vector<int>a; make_heap(a.begin(), a.end())
push_heap(a, a + n) // 末尾元素入堆并调整,与push_back配合(push_back将元素添加到数组的末尾,然后用push_heap来调整堆)
pop_heap(a, a + n) // 堆顶移到末尾并调整,与pop_back配合(pop_heap将堆顶元素移动到数组的末尾,然后用pop_back从数组中移除该元素)
sort_heap(a, a + n) // 升序堆排序
is_permutation() // 两个序列是否互为另一个的排序,即检查它们是否包含相同数量的相同元素,尽管元素的顺序可能不同
next_permutation() // 重排为字典序的下一个更大的排列。如果这样的排列存在,返回true;否则,重排为第一个排列(即升序排列),返回false
prev_permutation() // 重排为字典序的上一个更小的排列。如果这样的排列存在,返回true;否则,重排为最后一个排列(即降序排列),返回false
fill(a, a + n, val) // 批量赋值
reverse(a, a + n) // 数组翻转
auto it = find(shuzu, shuzu+n, 1)
auto it = find(v1.begin(), v1.end(), 1) // 查找v1中有没有1,find函数返回一个迭代器,如果v1中有1则迭代器it指向找到的第一个目标元素,否则指向v1.end()
// vector set multiset 普通数组都能用find,queue priority_queue stack不能用
如
int a[10] = {5,2,3,4,5};
int b[10] = {5,2,3,4,1};
cout << is_permutation(a, &a[5], b);
is_permutation (c1.begin()+1, c1.end(), c2.begin());
vector
vector <int> v1 // 空
vector <int> v2(5,0); // 5个0
vector<int> v3(v2.begin(), v2.end()); // 和v2相同
vector<int> v4(v2); // 和v2相同
v.at(k) // 访问 v[k]
v.front() // 首元素
v.back() // 末元素
v.begin() // 首地址(迭代器) 用于和v.end()一起放到find()里面去找v中是否存在某个值
v.end() // 末地址(迭代器) 如auto it = find(v1.begin(),v1.end(),1)
v.empty() // 是否空 返回true/false
v.size() // 大小
v.max_size() // 最大空间
v.clear() // 清除
v.insert(pos, item) // 在 pos(迭代器) 位置插入 item
v.eraze(pos) // 擦除 pos(迭代器) 位置的元素
v.push_back(item) // 末尾插入
v.pop_back() // 末尾删除
v.reserve(n); // 请求向量容量至少足以包含 _n_ 个元素。
// v.size()的返回值是unsigned,所以...
vector<int> v;
v.push_back(3);
for(int i=0;i<=v.size()-1;i++) {//错误
cout<<v[i]<<" ";
}
for(int i=0;i<=(int)v.size()-1;i++) {//(正确)
cout<<v[i]<<" ";
}
queue
/*----- queue -----*/
queue<int> q;
q.push(item) // item 入队
q.front() // 访问队头
q.pop() // 出队
q.back() // 访问队尾
q.empty() // 是否空
q.size() // 大小
q.emplace(item) // item 替换队尾
/*----- priority_queue -----*/
priority_queue<int, vector<int>, greater<int>> pq
pq.top() // 访问队首
pq.empty() // 优先队列是否空
pq.size() // 大小
pq.push(item) // 插入 item
pq.pop() // 出队
优先队列的声明
priority_queue <int> i; //【排序】14 12 10 8 6
priority_queue <double> d;
priority_queue <int,vector<int>,less<int> >q;//【排序】14 12 10 8 6
priority_queue <int,vector<int>,greater<int> > q;//【排序】6 8 10 12 14
// 不需要#include<vector>头文件,注意后面两个“>”不要写在一起,“>>”是右移运算符
结构体的优先队列
重写cmp
struct node{
int fir,sec;
void Read() {scanf("%d %d",&fir,&sec);}
}input;
struct cmp1{
bool operator () (const node &x,const node &y) const{
return x.fir<y.fir;
}
};//当一个node x的fir值小于另一个node y的fir值时,x在y后面
struct cmp3{
bool operator () (const node &x,const node &y) const{
return x.fir+x.sec<y.fir+y.sec;
}
};//当一个node x的fri值和sec值的和小于另一个node y的fir值和sec值的和时,x在y后面
priority_queue<node,vector<node>,cmp1> q1;
priority_queue<node,vector<node>,cmp3> q3;
while(!q1.empty()) printf("(%d,%d) ",q1.top().fir,q1.top().sec),q1.pop();
while(!q3.empty()) printf("(%d,%d) ",q3.top().fir,q3.top().sec),q3.pop();
【输入】
1 2
2 1
6 9
9 6
-100 100
-500 20
4000 -3000
【输出】
cmp1: (4000,-3000) (9,6) (6,9) (2,1) (1,2) (-100,100) (-500,20)
cmp3: (4000,-3000) (6,9) (9,6) (1,2) (2,1) (-100,100) (-500,20)
stack
stack<int> s;
s.push(item) // item 入栈
s.top() // 访问栈顶
s.pop() // 出栈
s.empty() // 栈是否空
s.size() // 大小
s.emplace(item) // item 替换栈顶
set
/*----- set 不允许容器中有重复元素 -----*/
s.size() // 大小
s.empty() // 是否空
s.clear() // 清除
s.insert(key) // 插入
s.erase(pos/key) // 删除
s.erase(3); // 删除键值为3的元素 {1,2,3,4,5}->{1,2,4,5}
auto it = s.find(4);
if (it != s.end()){
s.erase(it); // 删除迭代器it指向的元素 {1,2,3,4,5}->{1,2,3,5}
}
s.count(key) // 是否存在
s.find(key) // 查找,成功返回位置,失败返回 s.end()
/*----- multiset 允许容器中有重复元素 -----*/
ms.size() // 大小
ms.empty() // 是否空
ms.clear() // 清除
ms.insert(key) // 插入
ms.erase(pos/key) // 删除
ms.count(key) // 计数
ms.find(key) // 查找,成功返回位置,失败返回 s.end()
//插⼊
for(int i=1;i<=n;i++)
s.insert(gint());
// set容器排序:利用仿函数改变排序规则
class MyCompare{
public:
bool operator()(int v1, int v2) {
return v1 > v2;
}
};
int main() {
//默认从小到大 10 20 30 40 50
set<int> s1 = {10, 20, 30, 40, 50};
//指定排序规则 50 40 30 20 10
set<int, MyCompare> s2 = {10, 20, 30, 40, 50};
return 0;
}
// set的遍历
// 法1
for (set<int>::iterator it = s1.begin(); it != s1.end(); ++it) {
cout << *it << ' ';
}
// 法2
for (auto it = mySet.begin(); it != mySet.end(); ++it) {
cout << *it << ' ';
}
// 法3
for (int it : mySet) {
cout << it << ' ';
}
pair
可以用来代替一些便捷的自定义struct。且pair自带小于号,可直接用于排序,第一关键字为第一维升序,第二关键字为第二维升序
pair<int,int> p1;
pair<int,string> p2;
pair<double,int> p3;
map
构建⼀个映射关系复杂度为
map<T1,T2> mp;
map<int,int> mp1;
map<string,int> mp2;
map<int,set<int> mp3;
map<int,vector<int>> mp4;
存图
邻接矩阵
- 存储稠密图
- 实现时需要注意重边与自环。对于最短路问题,可以在重复的边中选择边权最小的一条保留。
- Floyd 算法适合邻接矩阵
int d[N][N]; // N 个结点的邻接矩阵
邻接表
- 存储稠密图
- 对于每个结点,使用一个 vector 保存与之相连的边。
vector实现无权邻接表 - 假设图中总共至多有 N 个结点,每条边不含边权。可以这样实现邻接表:
vector<int> g[N]; // N 个结点的邻接表
g[u].emplace_back(v); // 添加一条边 u → v
for (int i = 0; i < g[u].size(); i++) {
int v = g[u][i]; // 遍历 u 的出边 u → v
// · · ·
}
- 实际上,可以使用语法糖简化遍历出边的实现,但是并不建议滥用 auto。
for (auto v : g[u]) {
// 遍历 u 的出边 u → v
// · · ·
}
vector实现有权邻接表
- 对于具有边权或是其他信息的边,可以定义结构体以保存边的信息。
struct Edge {
int to; // 边指向的点
int weight; // 边权
}
vector<Edge> g[N]; // N 个结点的邻接表
g[u].push_back({v, w}); // 添加边权为 w 的一条边 u → v
pair实现有权邻接表
- 两个元素的有序对
⟨x, y⟩可以使用 STL 的 pair 保存。 pair ⟨x, y⟩之间的大小关系定义为:- 第一个元素类型 T1,第二个元素类型 T2 的 pair:
pair<T1, T2> p; - 创建一个 pair:
p = make_pair(x, y); - 取 pair 的第一个元素:
p.first - 取 pair 的第二个元素:
p.second - 可以用 pair 实现邻接表。第一个元素保存边指向的点,第二个元素保存边权:
vector<pair<int, int>> g[N];
g[u].emplace_back(make_pair(v, w));
// 添加边权为 w 的一条边 u → v
for (auto e : g[u]) {
int v = e.first, w = e.second;
// 遍历 u 的出边 u → v,边权为 w
}
char*和string
char* to string
char* name;
string softwareName = name;
string to char*
char* strToChar(string strSend){
char* ConvertData;
const int len2 = strSend.length();
ConvertData = new char[len2 + 1];
strcpy(ConvertData, strSend.c_str());
return ConvertData;
}
插入排序
void insertSort(keytype k[ ],int n){
keytype temp;
for(int i=1; i<n; i++){
temp = k[i];
for(int j=i-1; j>=0 && temp<k[j]; j--)
k[j+1] = k[j];
k[j+1] = temp;
}
}
归并排序
#include <stdio.h>
#include <ctype.h>
#include <string.h>
#include <math.h>
#include <stdlib.h>
#define MAX 1000
int temp[MAX], ans[MAX] = {50, 10, 20, 30, 70, 40, 80, 60};
void Mergesort(int startId, int endId);
void Merge(int startId, int midId, int endId);
int main() {
Mergesort(0, 7);
for(int i=0; i<8; i++)
printf("%d ", ans[i]);
return 0;
}
void Mergesort(int startId, int endId){
int midId = startId + (endId - startId)/2;
if(startId < endId){
Mergesort(startId, midId);
Mergesort(midId+1, endId);
Merge(startId, midId, endId);
}
}
void Merge(int startId, int midId, int endId){
int i=startId, j=midId+1, k=startId;
while(i <= midId && j<=endId){
if(ans[i] < ans[j]){
temp[k] = ans[i];
k++; i++;
}else{
temp[k] = ans[j];
k++; j++;
}
}
while(i <= midId){
temp[k] = ans[i];
k++; i++;
}
while(j <= endId){
temp[k] = ans[j];
k++; j++;
}
for(i=startId; i<=endId; i++){
ans[i] = temp[i];
}
}
逆序对计数
#include <iostream>
using namespace std;
typedef long long ll;
#define MAX (200000+5)
int temp[MAX], a[MAX];
ll solve(int a[], int left, int right);
int main() {
int n;
cin >> n;
for (int i = 0; i < n; i++)
cin >> a[i];
cout << solve(a, 0, n - 1);
return 0;
}
ll solve(int a[], int left, int right) {
if (left == right)
return 0;
else { // 分治
int mid = (right - left) / 2 + left; // 分
ll s1 = solve(a, left, mid); // 治:左边排序
ll s2 = solve(a, mid + 1, right); // 治:右边排序
ll s3 = 0;
int i = left, j = mid + 1, k = 0;
while (i <= mid && j <= right) { // 合:整体排序
if (a[i] <= a[j]) { // 如果 a[i] <= a[j] 就放a[i]进去
temp[left + k] = a[i];
k++;
i++;
} else { // 如果 a[i] > a[j] 就放a[j]进去
temp[left + k] = a[j];
s3 += (mid - i + 1); // 如果a[j]<a[i],说明a[j]<a[i]~a[mid],共有mid-i+1个逆序对
k++;
j++;
}
}
if (i <= mid)
while (i <= mid) {
temp[k + left] = a[i];
k++;
i++;
}
else
while (j <= right) {
temp[k + left] = a[j];
k++;
j++;
}
for (int l = left; l <= right; l++)
a[l] = temp[l];
return s1 + s2 + s3;
}
}
多数问题
n个数组成一个数组,寻找是否有一个数的数量≥n/2
#include <stdio.h>
const int N = 2000000; //定义数组的最大长度
int a[N];
int majorityDC(int a[], int start, int end, int *result) {
// 分治法求解多数问题,*result是数量过半的数的值,数组下标区间为[start, end]
if (start == end) {
*result = a[end];
return 1;
}else{
int m1, m2;
majorityDC(a, start, (start + end) / 2, &m1);
//m1为前半区间[start, (start + end) / 2]的多数
majorityDC(a, (start + end) / 2 + 1, end, &m2);
//m2为后半区间[(start + end) / 2 + 1, end]的多数
int count1 = 0, count2 = 0;
for (int i = start; i <= end; i++) {
if (a[i] == m1) { //count1记录m1在数组a[]中出现的次数
count1++;
}
if (a[i] == m2) { //count2记录m2在数组a[]中出现的次数
count2++;
}
}
if(count1 > ((end - start + 1) / 2)) {
//m1在数组a[]中出现的次数大于数组长度的一半,则m1为多数
*result = m1;
return 1;
}else if(count2 > ((end - start + 1) / 2)) {
//m2在数组a[]中出现的次数大于数组长度的一半,则m2为多数
*result = m2;
return 1;
}else{
return 0; //m1, m2均不是多数,则数组a[]的多数不存在
}
}
}
int main() {
int n, resultDC;
scanf("%d", &n);
for(int i=0; i<n; i++){
scanf("%d\n", &a[i]);
}
if(majorityDC(a, 0, n - 1, &resultDC)){
printf("%d", resultDC);
}else{
printf("Can not find the majority!");
}
return 0;
}
维护堆的性质
- 堆的定义:
- 是一棵完全二叉树
- 每个节点的值都大于或等于其子节点的值,为最大堆;反之为最小堆。
- 堆的存储:一般用数组来表示堆,下标为i的结点的父结点下标为
时间复杂度
c递归维护
// 维护最大堆的性质
// arr:一个最大堆的数组
// i:需要调整的堆中的元素
void max_heapify(int arr[], int i, int n){
// 从a[i] a[l] a[r]选择最大的
int l = 2*i+1, r = 2*i+2;
int largest = i;
if(l <= n && arr[l]>arr[largest]){
largest = l;
}
if(r <= n && arr[r]>arr[largest]){
largest = r;
}
// 如果a[i]最大,程序结束
if(largest != i){
swap(&arr[i], &arr[largest]);
max_heapify(arr, largest);
}
}
void swap(int* a, int* b) {
int temp = *b;
*b = *a;
*a = temp;
}
c非递归维护
// 维护最大堆的性质
// arr:一个最大堆的数组
// i:需要调整的堆中的元素
void max_heapify(int arr[], int start, int end) {
//建立父节点指标和子节点指标
int dad = start;
int son = dad * 2 + 1;
while (son <= end) { //若子节点指标在范围内才做比较
if (son + 1 <= end && arr[son] < arr[son + 1]) //先比较两个子节点大小,选择最大的
son++;
if (arr[dad] > arr[son]) //如果父节点大于子节点代表调整完毕,直接跳出函数
return;
else { //否则交换父子内容再继续子节点和孙节点比较
swap(&arr[dad], &arr[son]);
dad = son;
son = dad * 2 + 1;
}
}
}
void swap(int* a, int* b) {
int temp = *b;
*b = *a;
*a = temp;
}
建堆
时间复杂度
void build_max_heap(int arr[ ],int n){
int i;
for(i=n/2-1; i>=0; i--) // 建初始堆积
max_heapify(arr, i, n);
}
堆排序算法
时间复杂度
c非递归维护最大堆
// 堆排序
void heapsort(int arr[], int n){
build_max_heap(arr, n); // 先建堆
for (int i = n - 1; i > 0; i--) {
swap(&arr[0], &arr[i]); // 将第一个元素(剩下的max)和已排好元素前一位做交换
max_heapify(arr, 0, i - 1); // 重新调整
}
}
// 建堆
void build_max_heap(int arr[ ],int n){
int i;
for(i=n/2-1; i>=0; i--) // 建初始堆积
max_heapify(arr, i, n);
}
// 维护最大堆的性质
// arr:一个最大堆的数组
// i:需要调整的堆中的元素
void max_heapify(int arr[], int i, int n){
// 从a[i] a[l] a[r]选择最大的
int l = 2*i+1, r = 2*i+2;
int largest = i;
if(l <= n && arr[l]>arr[i]){
largest = l;
}
if(r <= n && arr[r]>arr[largest]){
largest = r;
}
// 如果a[i]最大,程序结束
if(largest != i){
swap(&arr[i], &arr[largest]);
max_heapify(arr, largest, n);
}
}
void swap(int* a, int* b) {
int temp = *b;
*b = *a;
*a = temp;
}
c+cpp递归维护最大堆
#include <stdio.h>
#include <stdlib.h>
void swap(int* a, int* b) {
int temp = *b;
*b = *a;
*a = temp;
}
// 维护最大堆的性质
// arr:一个最大堆的数组
// i:需要调整的堆中的元素
void max_heapify(int arr[], int start, int end) {
//建立父节点指标和子节点指标
int dad = start;
int son = dad * 2 + 1;
while (son <= end) { //若子节点指标在范围内才做比较
if (son + 1 <= end && arr[son] < arr[son + 1]) //先比较两个子节点大小,选择最大的
son++;
if (arr[dad] > arr[son]) //如果父节点大于子节点代表调整完毕,直接跳出函数
return;
else { //否则交换父子内容再继续子节点和孙节点比较
swap(&arr[dad], &arr[son]);
dad = son;
son = dad * 2 + 1;
}
}
}
// 堆排序算法
void heap_sort(int arr[], int len) {
int i;
//建堆,初始化,i从最后一个父节点开始调整
for (i = len / 2 - 1; i >= 0; i--)
max_heapify(arr, i, len - 1);
//先将第一个元素和已排好元素前一位做交换,再从新调整,直到排序完毕
for (i = len - 1; i > 0; i--) {
swap(&arr[0], &arr[i]);
max_heapify(arr, 0, i - 1);
}
}
#include <iostream>
#include <algorithm>
using namespace std;
// 维护最大堆的性质
// arr:一个最大堆的数组
// i:需要调整的堆中的元素
void max_heapify(int arr[], int start, int end) {
//建立父节点指标和子节点指标
int dad = start;
int son = dad * 2 + 1;
while (son <= end) { //若子节点指标在范围内才做比较
if (son + 1 <= end && arr[son] < arr[son + 1]) //先比较两个子节点大小,选择最大的
son++;
if (arr[dad] > arr[son]) //如果父节点大于子节点代表调整完毕,直接跳出函数
return;
else { //否则交换父子内容再继续子节点和孙节点比较
swap(arr[dad], arr[son]);
dad = son;
son = dad * 2 + 1;
}
}
}
// 堆排序算法
void heap_sort(int arr[], int len) {
//初始化,i从最后一个父节点开始调整
for (int i = len / 2 - 1; i >= 0; i--)
max_heapify(arr, i, len - 1);
//先将第一个元素和已经排好的元素前一位做交换,再从新调整(刚调整的元素之前的元素),直到排序完毕
for (int i = len - 1; i > 0; i--) {
swap(arr[0], arr[i]);
max_heapify(arr, 0, i - 1);
}
}
用cpp的algorithm建堆和堆排序
#include <bits/stdc++.h>
using namespace std;
int main() {
vector<int> a = {1,2,3,4,5,6,7,8,9};
make_heap(a.begin(), a.end()); // 造堆
for(int i : a){
cout << i << " ";
}
cout << endl;
sort_heap(a.begin(), a.end()); // 堆排序
for(int i : a){
cout << i << " ";
}
return 0;
}
c优先队列
读最大元素 O(1)
int heap_maximum(int arr[]){
return arr[0];
}
移走最大元素 O(lgn)
int heap_extract_max(int arr[], int n){
if(n < 1){
printf("HEAP UNDERFLOW");
return -1;
}
int max = arr[0];
arr[0] = arr[n-1];
n--;
max_heapify(arr, 0, n);
return max;
}
增加某结点的值 O(lgn)
void heap_increase_key(int arr[], int i, int key){ // 修改结点arr[i]的值为key
if(key < arr[i]){
printf("NEW KEY IS SMALLER THAN CURRENT KEY");
}
arr[i] = key;
while(i>0 && arr[(i-1)/2]<arr[i]){
swap(&a[i], &arr[(i-1)/2]);
i = (i-1)/2;
}
}
插入一个新节点 O(lgn)
void max_heap_insert(int arr[], int key, int n){
n++;
a[n-1] = key-1;
heap_increase_key(arr, n-1, key);
}
快速排序
最好情况/平均情况:
法1
// way1
#include <bits/stdc++.h>
#define keytype int
using namespace std;
void quickSort(keytype k[],int n);
void quick(keytype k[ ],int left,int right);
void swap(int *x, int *y);
void quickSort(keytype k[],int n){
quick(k, 0, n-1);
}
void quick(keytype k[ ],int left,int right){
int i, j;
keytype pivot;
if(left < right){
i = left;
j = right+1;
pivot = k[left];
while(1){
while(k[++i]<pivot && i!=right) { }
while(k[--j]>pivot && j!=left) { }
if(i < j)
swap(&k[i], &k[j]); /*交换K[i]与K[j]的内容*/
else
break;
}
swap(&k[left], &k[j]); /*交换K[s]与K[j]的内容*/
quick(k, left, j-1); /* 对前一部分排序 */
quick(k, j+1, right); /* 对后一部分排序 */
}
}
void swap(keytype *x, keytype *y){
keytype temp;
temp = *x;//取内容交换
*x = *y;
*y = temp;
}
int main() {
int a[100] = {2,3,4,5,1,123,1524,4235,345,34,67,324};
quickSort(a, 12);
for(int i=0; i<12; i++){
printf("%d ", a[i]);
}
return 0;
}
法2
// way2 BY K&R
#include <bits/stdc++.h>
#define keytype int
using namespace std;
void quickSort(keytype k[],int n);
void qsort(keytype v[ ],int left, int right);
void swap(keytype v[ ],int i, int j);
void quickSort(keytype k[],int n){
qsort(k, 0, n-1);
}
void qsort(keytype v[ ],int left, int right){
int i, last;
if(left >= right)
return;
swap(v, left, (left+right)/2);// 将中间与left交换,将中间作为基准
last = left; // last: 最后一个比left小的元素
for(i=left+1; i<=right; i++)
if(v[i] < v[left]) // 如果当前元素小于基准元素
swap(v, ++last, i); // last右移,获得新的last
swap(v, left, last); // 把基准元素left放到正确位置
qsort(v, left, last);
qsort(v, last+1, right);
}
void swap(keytype v[ ],int i, int j){
keytype tmp;
tmp = v[i];
v[i] = v[j];
v[j] = tmp;
}
int main() {
int a[100] = {2,3,4,5,1,123,1524,4235,345,34,67,324};
quickSort(a, 12);
for(int i=0; i<12; i++){
printf("%d ", a[i]);
}
return 0;
}
快速排序的随机化版本
最坏情况:
期望运行时间:
#include <bits/stdc++.h>
#include <random>
using namespace std;
int randomized_partition(int a[], int p, int r);
void randomized_quiksort(int a[], int p, int r);
int partition(int a[], int p, int r);
void randomized_quiksort(int a[], int p, int r){
if(p < r){
int q = randomized_partition(a, p, r); // 随机选择一个元素作为基准,并进行划分
randomized_quiksort(a, p, q-1);
randomized_quiksort(a, q+1, r);
}
}
int randomized_partition(int a[], int p, int r){
int i = rand()%(r-p)+p; // 在[p, r]范围内随机选择一个索引作为基准
swap(a[r], a[i]);
return partition(a, p, r); // 调用partition函数进行划分
}
int partition(int a[], int p, int r){
int x = a[r];
int i = p-1; // i指向小于基准的最后一个元素
for(int j=p; j<=r-1; j++){
if(a[j] <= x){
i++; // i右移
swap(a[i], a[j]); // 交换元素,将小于基准的元素移到左边
}
}
swap(a[i+1], a[r]); // 将基准元素交换到正确的位置
return i+1; // 返回基准元素的最终位置
}
int main() {
int a[100] = {2,3,4,5,1,123,1524,4235,345,34,67,324};
randomized_quiksort(a, 0, 12);
for(int i=0; i<12; i++){
printf("%d ", a[i]);
}
return 0;
}
最大子列和
#include <iostream>
#include <algorithm>
#define MAX 1000005
#define ll long long
using namespace std;
int a[MAX];
// 输入:数组array 数组长度n 返回:array的子列中最大的和
ll maxSubArray(int *array, int n) {
ll Max = -0x3f3f3f3f3f3f3f3f;
ll sum = 0;
for (int i = n - 1; i >= 0; i--) {
if (sum < 0) // 如果sum已经<0了,留下sum只会让之后的和更小,所以去掉sum
sum = array[i];
else
sum += array[i];
Max = max(sum, Max);
}
return Max;
}
int main() {
int n;
cin >> n;
for (int i = 0; i < n; i++)
cin >> a[i];
cout << maxSubArray(a, n);
return 0;
}
钢条切割
给定一段长度为
带备忘的自顶向下法(top-down with memoization)
- 复杂度:
将钢条分为两部分,左边长度为
这样,不做任何切割的方案就可以描述为:第一段的长度为
#include <bits/stdc++.h>
using namespace std;
#define MAX 100
#define MIN_VALUE -1
int max(int a, int b){
if(a > b){
return a;
}else{
return b;
}
}
// p为价格表,n为正在切割的钢管长度,r为最大收益
int MEMOIZED_CUT_ROD_AUX(int* p, int n, int* r){
int q;
if(r[n] >= 0){ // 切过这个长度,已经记住了
return r[n];
}
if(n == 0){ // 切一段长度为0的
q = 0;
}else{
q = MIN_VALUE;
for(int i=1; i<=n; i++){ // 左边长度i,右边长度n-i
q = max(q, p[i]+MEMOIZED_CUT_ROD_AUX(p, n-i, r));
}
}
r[n] = q;
return q;
}
// 函数入口 p为价格表 n为正在切割的钢管长度 返回能得到的最大value
int MEMOIZED_CUT_ROD(int* p, int n){
int r[MAX];
for(int i=0; i<=n; i++){
r[i] = MIN_VALUE;// 初始化
}
return MEMOIZED_CUT_ROD_AUX(p, n, r);
}
int main() {
int p[15] = {0, 1, 5, 8, 9, 10, 17,17, 20, 24, 30};
printf("%d", MEMOIZED_CUT_ROD(p, 14));
return 0;
}
给出最大收益及最优切割方案
下面的 EXTENDED_BOTTOM_UP_CUT_ROD 对长度为
#include <bits/stdc++.h>
using namespace std;
#define MAX 100
#define MIN_VALUE (-1)
int s[MAX], r[MAX];
void EXTENDED_BOTTOM_UP_CUT_ROD(int *p, int n){
r[0] = 0;
for(int j=1; j<=n; j++){
int q = MIN_VALUE;
for(int i=1; i<=j; i++){
if(q < p[i]+r[j-i]){ // 更好的切割
q = p[i]+r[j-i]; // 更新价格
s[j] = i; // 更新切割方式
}
}
r[j] = q;
}
}
// p:价格表 n:要切的钢条长度
void PRINT_CUT_ROD_SOLUTION(int *p,int n){
EXTENDED_BOTTOM_UP_CUT_ROD(p, n);
// 计算切割下来的每段钢条的长度s[1..n]和最大value r[1..n]
printf("%d\n", r[n]);
while(n > 0){
printf("%d ", s[n]);
n -= s[n];
}
}
int main() {
int p[15] = {0, 1, 5, 8, 9, 10, 17,17, 20, 24, 30};
PRINT_CUT_ROD_SOLUTION(p, 14);
return 0;
}
矩阵链乘法
- 矩阵链乘法问题:给定n个矩阵的链
- 完全括号化:它是单一矩阵,或者是两个完全括号化的矩阵乘积链的积,且已外加括号。
例如,如果矩阵链为
#include <bits/stdc++.h>
using namespace std;
/*
* p: 表示矩阵的规模,矩阵 A_i 的规模用 p_i-1 * p_i 表示
* s: s[i,j]表示A_i A_i+1 ... A_j最优括号化方案的分割点位置k
* m: m[i,j]表示A_i A_i+1 ... A_j所需标量乘法次数的最小值
*/
#define MAX 100
long long p[MAX],m[MAX][MAX],s[MAX][MAX];
void MATRIX_CHAIN_ORDER(int n){
// 初始化
for(int i=1; i<=n; i++){
m[i][i] = 0;
}
for(int l=2; l<=n; l++){ // l is the chain length
for(int i=1; i<=n-l+1; i++){ // 矩阵链的起始位置
int j = i+l-1; // 矩阵链的结束位置
m[i][j] = 9223372036854775807; // long long 最大值
for(int k=i; k<=j-1; k++){ // A_i...A_j 的最优括号化方案的分割点为k
long long q = m[i][k]+m[k+1][j] + p[i-1]*p[k]*p[j];
if(q < m[i][j]){
m[i][j] = q;
s[i][j] = k;
}
}
}
}
}
void PRINT_OPTIMAL_PARENS(long long i, long long j){
if(i == j){
printf("A");
}else{
printf("(");
PRINT_OPTIMAL_PARENS(i, s[i][j]);
PRINT_OPTIMAL_PARENS(s[i][j]+1, j);
printf(")");
}
}
int main() {
int n;
scanf("%d", &n); // n个矩阵
for(int i=0; i<=n; i++){
scanf("%lld", &p[i]);
}
MATRIX_CHAIN_ORDER(n);
printf("%lld\n", m[1][n]); // A_1..A_n所需标量乘法次数的最小值
PRINT_OPTIMAL_PARENS(1,n);
return 0;
}
最长公共子序列
- 子序列:给定一个序列
例如, - 公共子序列:给定两个序列
- 最长公共子序列问题(longest-common-subsequence problem):给定两个序列
复杂度:
#include <stdio.h>
#include <string.h>
#define MAX 100
int c[MAX][MAX];
// 接受字符串x和y,寻找x和y的最长公共子序列
void LCS_LENGTH(char *x, char *y){
// 初始化
int xLen = strlen(x), yLen = strlen(y);
for(int i=1; i<xLen; i++){
if(y[0] == x[i] || c[i-1][0] == 1){
c[i][0] = 1;
}
}
for(int i=1; i<yLen; i++){
if(x[0] == y[i] || c[0][i-1] == 1){
c[0][i] = 1;
}
}
for(int i=1; i<xLen; i++){
for(int j=1; j<yLen; j++){
if(x[i] == y[j]){
c[i][j] = c[i-1][j-1] + 1;
}else if(c[i-1][j] >= c[i][j-1]){ // xi!=yj时f(x)=max(c[i-1,j],c[i,j-1])
c[i][j] = c[i-1][j];
}else{
c[i][j] = c[i][j-1];
}
}
}
}
// 最长公共子序列 输入字符串x,y 字符串长度-1是i,j
void PRINT_LCS(char *x, char *y, int i, int j){
if(i == -1 || j == -1){
return;
}
if(x[i] == y[j]){
PRINT_LCS(x, y, i-1, j-1);
printf("%c ", x[i]);
}else if(c[i-1][j] >= c[i][j-1]){
PRINT_LCS(x, y, i-1, j);
}else{
PRINT_LCS(x, y, i, j-1);
}
}
int main() {
char x[MAX] = "ABCBDAB", y[MAX] = "BDCABA";
LCS_LENGTH(x,y);
PRINT_LCS(x, y, strlen(x)-1, strlen(y)-1);
return 0;
}
最长公共子串
// 最长公共子串 输入字符串s1和s2 返回最长公共子串的长度max
int PRINT_LCS2(char *s1, char *s2){
int max = 0, start = 0, len1 = strlen(s1), len2 = strlen(s2);
for(int i=1; i<=len1; i++){
for(int j=1; j<=len2; j++){
if(s1[i-1] == s2[j-1])
dp[i][j] = dp[i-1][j-1] + 1;
if(dp[i][j] > max){
max = dp[i][j]; // 最长公共子串的长度
start = i - max; // 该子串的起始点位
}
}
}
return max;
}
最优二叉搜索树
- 最优二叉搜索树问题:给定一个
个 , , , - 最优二叉搜索树:对于一个给定的概率集合,我们希望构造一棵期望搜索代价最小的二叉搜索树,我们称之为最优二叉搜索树
复杂度: - 穷举法获得最优二叉搜索树的时间复杂度为
#include <stdio.h>
#define MAX (1000+10)
#define MAXE 1000000000
double p[MAX], q[MAX], w[MAX][MAX], e[MAX][MAX];
// p,q为概率,表示其搜索频率
// e[i,j]为在包含关键字k_i,..,k_j的最优二叉搜索树中进行一次搜索的期望代价
// w[i,j]为在关键字k_i,..,k_j的期望之和
int root[MAX][MAX], n = 5;
void optimalBST(double *p,double *q,int n);
void printRoot();
void printOptimalBST(int i,int j,int r);
int main() {
scanf("%d", &n);
for(int i=1; i<=n; i++){
scanf("%lf", &p[i]);
}
for(int i=0; i<=n; i++){
scanf("%lf", &q[i]);
}
optimalBST(p,q,n);
printf("%lf\n", e[1][n]); // 最小的cost
printRoot(); // 输出所有的根
printf("最优二叉树结构:best structure\n");
printOptimalBST(1,n,-1); // 深度优先遍历输出最优二叉树的结构
return 0;
}
//接受概率列表p和q及规模n作为输入,返回cost表e和根表root。
void optimalBST(double *p,double *q,int n){
// 初始化只包括虚拟键的子树
for (int i = 1;i <= n + 1;++i){
w[i][i - 1] = q[i - 1];
e[i][i - 1] = q[i - 1];
}
// 由上到下,由左到右逐步计算
for (int len = 1;len <= n;++len){
for (int i = 1;i <= n - len + 1;++i){
int j = i + len - 1;
e[i][j] = MAXE;
w[i][j] = w[i][j - 1] + p[j] + q[j]; // i到j的期望之和
// 求取最小代价的子树的根
for (int k = i;k <= j;++k){ // 遍历所有可能的根
// e[i,j] = p_k+(e[i,k-1]+w[i,k-1]) + (e[k+1,j]+w[k+1,j])
// = e[i,k-1]+e[k+1,j] + w[i,j]
double temp = e[i][k - 1] + e[k + 1][j] + w[i][j];
if (temp < e[i][j]){
e[i][j] = temp;
root[i][j] = k;
}
}
}
}
}
// 输出最优二叉查找树所有子树的根
void printRoot(){
printf("各子树的根 roots\n");
for (int i = 1;i <= n;++i){
for (int j = 1;j <= n;++j){
printf("%d ", root[i][j]);
}
puts("");
}
puts("");
}
// 打印最优二叉查找树的结构
// 打印出[i,j]的子树,它是根r的左子树和右子树
void printOptimalBST(int i,int j,int r){
int rootChild = root[i][j];
if (rootChild == root[1][n]){
// 输出整棵树的根
printf("k%d is root\n", rootChild);
printOptimalBST(i,rootChild - 1,rootChild);
printOptimalBST(rootChild + 1,j,rootChild);
return;
}
if (j < i - 1){
return;
}else if (j == i - 1){ // 遇到虚拟键
if (j < r){
printf("d%d is k%d's left son\n", j, r);
}else {
printf("d%d is k%d's right son\n", j, r);
}
return;
}else{ // 遇到内部结点
if (rootChild < r){
printf("k%d is k%d's left son\n", rootChild, r);
}else{
printf("k%d is k%d's right son\n", rootChild, r);
}
}
printOptimalBST(i,rootChild - 1,rootChild);
printOptimalBST(rootChild + 1,j,rootChild);
}
最小编辑距离
#include <iostream>
#include <string>
#define MAX 2005
using namespace std;
int ans;
int dp[2][MAX];
int min3(int a, int b, int c) {
int m = a;
if (b < m)
m = b;
if (c < m)
return c;
return m;
}
int minDistance(string word1, string word2) {
int l1 = word1.length();
int l2 = word2.length();
for (int j = 0; j <= l2; j++)
dp[0][j] = j; // 初始化dp[0]为从空字符串到word2的编辑距离
for (int i = 1; i <= l1; i++) {
// dp[0][j]: word1前i-1个字符转化成word2的前j个字符的编辑距离
// dp[1][j]: word1前i个字符转化成word2的前j个字符的编辑距离
dp[1][0] = i;
for (int j = 1; j <= l2; j++)
if (word1[i - 1] == word2[j - 1])
dp[1][j] = dp[0][j - 1]; // 如果相同,和i-1到j-1的编辑距离一样
else {
dp[1][j] = min3(dp[0][j - 1], dp[0][j], dp[1][j - 1]) + 1;
// dp[0][j-1] 和i-1转成j-1一样,相当于word1换个字
// dp[0][j] 和i-1转成j一样,相当于word1加个字
// dp[1][j-1] 和i转成j-1一样,相当于word1删个字
}
for (int j = 0; j <= l2; j++)
dp[0][j] = dp[1][j];
}
return dp[0][l2];
}
int main() {
string a;
string b;
cin >> a >> b;
cout << minDistance(a, b);
printf("\n%d\n",ans);
return 0;
}
// 进行了什么编辑操作
#include <iostream>
#include <string>
#define MAX 2005
using namespace std;
int replace_count = 0;
int delete_count = 0;
int insert_count = 0;
int dp[MAX][MAX] = {};
int min3(int a, int b, int c) {
int m = a;
if (b < m)
m = b;
if (c < m)
return c;
return m;
}
void printOperations(string word1, string word2, int dp[MAX][MAX]) {
int i = word1.length();
int j = word2.length();
while (i > 0 || j > 0) {
if (i > 0 && j > 0 && word1[i - 1] == word2[j - 1]) {
i--;
j--;
} else if (j > 0 && (i == 0 || dp[i][j] == dp[i][j - 1] + 1)) {
insert_count++;
j--;
} else if (i > 0 && (j == 0 || dp[i][j] == dp[i - 1][j] + 1)) {
delete_count++;
i--;
} else {
replace_count++;
i--;
j--;
}
}
}
int minDistance(string word1, string word2) {
int l1 = word1.length();
int l2 = word2.length();
for (int j = 0; j <= l2; j++)
dp[0][j] = j;
for (int i = 1; i <= l1; i++) {
dp[i][0] = i;
for (int j = 1; j <= l2; j++) {
if (word1[i - 1] == word2[j - 1])
dp[i][j] = dp[i - 1][j - 1];
else
dp[i][j] = min3(dp[i - 1][j - 1], dp[i - 1][j], dp[i][j - 1]) + 1;
}
}
printOperations(word1, word2, dp);
return dp[l1][l2];
}
int main() {
string a;
string b;
cin >> a >> b;
int distance = minDistance(a, b);
cout << distance << endl;
printf("Replace: %d\n", replace_count);
printf("Delete: %d\n", delete_count);
printf("Insert: %d\n", insert_count);
return 0;
}
最长单调子序列/LIS(Longest Increasing Subsequence)
int LIS(){ // a为目标数组 ans为最终得到的最长单调子序列的长度
int ans=1;
for(int i=1; i<=n; i++){//枚举子序列的终点
dp[i]=1;// 初始化为1,长度最短为自身
for(int j=1; j<i; j++){//从头向终点检查每一个元素
if(a[i]>a[j]){
dp[i]=max(dp[i],dp[j]+1); // 状态转移
}
}
ans=max(ans,dp[i]); // 比较每一个dp[i],最大值为答案
}
return ans;
}
int main(){
while(cin>>n){
for(int i=1; i<=n; i++){ // 下标从1开始
cin>>a[i];
}
int ans=LIS();
cout<<ans<<"\n";
}
return 0;
}
// 严格单调递增子列的长度
int lsrsa(const vector<int> &a) {
vector<int> sa;
for (auto x: a) {
if (sa.empty() || x > sa.back()) // 如果sa为空或x>sa的最后一个元素
sa.push_back(x);
else
// 如果x<=sa的最后一个元素,二分查找找到sa中第一个>=x的数,并用x替换它。
// 实际上是在尝试找到更小的元素替代sa中的元素,这样后续可能可以添加更多的元素到sa中,从而形成一个更长的子序列。
*lower_bound(sa.begin(), sa.end(), x) = x;
}
return (int) sa.size();
}
// 单调不减子列的长度
int lrsa(const vector<int> &a) {
vector<int> sa;
for (auto x: a) {
if (sa.empty() || x >= sa.back()) // 如果sa为空或x>=sa的最后一个元素
sa.push_back(x);
else // 如果x<sa的最后一个元素,二分查找找到sa中第一个>x的数,并用x替换它。
*upper_bound(sa.begin(), sa.end(), x) = x;
}
return (int) sa.size();
}
活动选择问题
假定有一个
#include <bits/stdc++.h>
#define MAX 100
using namespace std;
struct thing{
int startTime, endTime;
};
struct thing things[MAX], ans[MAX]; // ans 参加的活动们
int n;
void Greedy_Activity_Selector(){
printf("0 ");
ans[0] = things[0];
int lastId=0, ansNum = 1; // 当前的最后一个活动的截止时间 当前已经参加的活动数量
for(int i=2; i<=n; i++){
if(things[i].startTime >= things[lastId].endTime){
ans[ansNum] = things[i];
ansNum++;
lastId = i;
printf("%d ", i);
}
}
printf("\n%d", ansNum);
}
int cmp(const void *a, const void *b){
struct thing *pa = (struct thing *)a;
struct thing *pb = (struct thing *)b;
if(pa->endTime < pb->endTime){
return -1;
}else{
if(pa->startTime < pb->startTime){
return -1;
}else{
return 1;
}
}
}
int main() {
scanf("%d", &n);
for(int i=0; i<n; i++){
scanf("%d", &things[i].startTime);
}
for(int i=0; i<n; i++){
scanf("%d", &things[i].endTime);
}
qsort(things, n, sizeof(struct thing), cmp); // 按活动结束时间升序排序
Greedy_Activity_Selector();
return 0;
}
0-1背包
一个正在抢劫商店的小偷发现了
二维dp
#include<bits/stdc++.h>
using namespace std;
const int N = 1010;
const int MaxW = 10000;
int n, W, v[N], w[N], f[N][MaxW];
int main(){
cin >> n >> W; // n物品数量 W最大重量
for (int i = 1; i <= n; ++i)
cin >> v[i] >> w[i]; // v价值 w重量
for (int i = 1; i <= n; i++){ // 遍历所有物品
for (int j = 0; j <= W; ++j){ // 重量从0到最大重量
f[i][j] = f[i - 1][j]; // 不选择当前物品时的价值,直接继承上一个状态的价值
// 如果当前背包容量可以放下当前物品,则尝试放入,更新最大价值
if (j >= w[i]) f[i][j] = max(f[i][j], f[i - 1][j - w[i]] + v[i]);
}
}
cout << f[n][W] << endl;
return 0;
}
一维dp
#include<bits/stdc++.h>
using namespace std;
const int N = 1010;
int n, W, v[N], w[N], f[N];
int main(){
cin >> n >> W; // n物品数量 W最大重量
for (int i = 1; i <= n; ++i)
cin >> v[i] >> w[i]; // v价值 w重量
for (int i = 1; i <= n; ++i){ // 遍历所有物品
for (int j = W; j >= w[i]; j--){ // 逆序遍历背包容量
// 更新f[j],即考虑放入当前物品i时的最大价值
f[j] = max(f[j], f[j - w[i]] + v[i]);
}
}
cout << f[W] << endl;
return 0;
}
01背包变种,一维dp
同样的
#include<bits/stdc++.h>
using namespace std;
#define N 510
long long n, W, v[N], w[N], f[N*N], sumV;
int main(){
memset(f, 0x3f, sizeof(f));
f[0] = 0;
cin >> n >> W; // n个物品 W最大重量
for (int i = 1; i <= n; ++i) {
cin >> w[i] >> v[i]; // w重量 v价值
sumV += v[i]; // 最大价值
}
for (int i = 1; i <= n; ++i){ // 遍历所有物品
for(int j=sumV; j>=v[i]; j--){ // 从最大价值开始,只有在j>=v[i]的情况下才有可能装当前的物品,否则f保持不变
f[j] = min(f[j], f[j-v[i]]+w[i]); // f[j]表示包内物品价值为j时的最小重量
}
}
long long ans = 0;
for(int j=0; j<=sumV; j++){ // 从价值为0到最大价值
if(f[j] <= W){ // 如果包内重量小于W
ans = j; // 更新ans
}
}
cout << ans << endl;
return 0;
}
完全背包
一个正在抢劫商店的小偷发现了
#include<bits/stdc++.h>
using namespace std;
const int N = 1010;
int n, W, v[N], w[N], f[N];
int main(){
cin >> n >> W; // 物品种类n 最大容量W
for (int i = 1; i <= n; ++i)
cin >> v[i] >> w[i]; // 价值v 体积w
for (int i = 1; i <= n; ++i){ // 遍历所有物品
for (int j = v[i]; j <= W; j--){ // 顺序遍历背包容量
// 更新f[j],即考虑放入当前物品i时的最大价值
f[j] = max(f[j], f[j - v[i]] + w[i]);
}
}
cout << f[W] << endl;
return 0;
}
分组背包
物品被分成若干组,每组中的物品只能选择一个。也就是说,从每组物品中,你只能选择一个或者不选,但不能选择多个
#include <iostream>
#include <algorithm>
using namespace std;
typedef long long ll;
const int MAX = 1005;
struct {
int cnt;
ll ID[MAX];
} group[MAX]; //用一个结构体来存储每一组的物品编号
ll dp[MAX]; // 最大价值
ll val[MAX]; // 每个物品的价值
ll weight[MAX]; // 每个物品的重量
ll group_bag(int cap, int max_group);
int main() {
int n, W;
cin >> W >> n; // n表示物品数量,W表示背包容量
int a, b, k, max_group = 0;
for (int i = 1; i <= n; i++) {
cin >> a >> b >> k; // a重量 b价值 k物品所在的组号
weight[i] = a;
val[i] = b;
group[k].ID[group[k].cnt++] = i;
max_group = max(max_group, k);
}
cout << group_bag(W, max_group);
return 0;
}
ll group_bag(int W, int max_group) {
for (int i = 0; i <= max_group; i++) // 第一层循环,遍历所有组
for (ll j = W; j >= 0; j--) // 第二层循环,从背包容量W到0倒序遍历
for (int k = 0; k < group[i].cnt; k++) // 第三层循环,遍历当前组内的所有物品
if (j >= weight[group[i].ID[k]]) // 如果当前物品可以放入背包
// 更新dp数组,选择放入或不放入当前物品,取最大值
dp[j] = max(dp[j],dp[j - weight[group[i].ID[k]]] + val[group[i].ID[k]]);
return dp[W];
}
多重背包
一个正在抢劫商店的小偷发现了
//二进制优化
#include<bits/stdc++.h>
using namespace std;
const int MAXN=1e5+10;
int n,W;
int v[MAXN],w[MAXN];
int f[MAXN];
int main(){
cin >> n >> W; // 物品个数n和最大重量W
int cnt = 0; // 记录二进制合成后的物体数
for(int i=1,a,b,s; i<=n; i++) {
cin>> a >> b >> s; // 单个价值a 单个重量b 数量s
int k = 1;
while(k <= s){ // 将每个物品都按照二进制合成
v[++cnt] = k*a;
w[cnt] = k*b;
s -= k;
k *= 2;
}
if(s){
v[++cnt] = s*a;
w[cnt] = s*b;
}
}
for(int i=1; i<=cnt; i++) // 01背包
for(int j=W; j>=v[i]; j--)
f[j] = max(f[j], f[j-v[i]]+w[i]);
cout << f[W];
return 0;
}
分数背包(部分背包)
一个正在抢劫商店的小偷发现了
#include <cstdio>
#include <cstdlib>
struct coin{
double w;// 重量
double v;// value
double rou;
};
int cmp(const void *a, const void *b){
struct coin *pa = (struct coin *)a;
struct coin *pb = (struct coin *)b;
if(pa->rou > pb->rou){
return -1;
}else{
return 1;
}
}
int main() {
int n; // 物品个数n
double W; // 最大容量W
scanf("%d%lf", &n, &W);
struct coin gold[110]={};
for(int i=0; i<n; i++){
scanf("%lf%lf", &gold[i].w, &gold[i].v);
gold[i].rou = gold[i].v / gold[i].w;
}
qsort(gold, n, sizeof(struct coin), cmp);
double ans=0;
int now=0;
while(W >= 0){
if(now == n){ // 遍历完所有物品
break;
}
if(gold[now].w < W){ // 放得下整个物品now
W -= gold[now].w;
ans += gold[now].v;
}else{ // 只能放部分
ans += gold[now].v * (W/gold[now].w);
W = 0;
break;
}
now++;
}
printf("%.2lf", ans);
return 0;
}
赫夫曼编码
考虑一种二进制字符编码,其中每个字符用一个唯一的二进制串表示,称为码字。如果使用定长编码,需要用3位来表示6个字符:a=000,b=001,…,f=101。这种方法需要300000个二进制位来编码文件。是否有更好的编码方案呢?
时间复杂度
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#define MAX 100
// 结构体
typedef struct Node {
char data;
int frequency;
struct Node* left;
struct Node* right;
} Node;
// 创建新节点的函数 return结构体指针类型 data结构体的字符 frequency字符的出现频率
Node* createNode(char data, int frequency) {
Node* node = (Node*)malloc(sizeof(Node));
node->data = data;
node->frequency = frequency;
node->left = NULL;
node->right = NULL;
return node;
}
// Huffman构建函数
Node* buildHuffmanTree(char* inputText) {
int charCount[256] = {};
int length = strlen(inputText);
int i;
// 统计ascii码为inputText[i]的字符的出现次数
for (i = 0; i < length; i++) {
charCount[(int)inputText[i]]++;
}
// 创建叶子结点
Node* nodes[256];
int nodeCount = 0;
for (i = 0; i < 256; i++) {
if (charCount[i] > 0) {
nodes[nodeCount] = createNode((char)i, charCount[i]);
nodeCount++;
}
}
// 依次合并叶子结点
while (nodeCount > 1) {
int minFrequency1 = length + 1; // 当前频率最小的
int minFrequency2 = length + 1; // 当前频率次小的
int index1 = -1;
int index2 = -1;
for (i = 0; i < nodeCount; i++) { // 获得minFrequency1和minFrequency2以及index1 index2
if (nodes[i]->frequency < minFrequency1) {
minFrequency2 = minFrequency1;
index2 = index1;
minFrequency1 = nodes[i]->frequency;
index1 = i;
} else if (nodes[i]->frequency < minFrequency2) {
minFrequency2 = nodes[i]->frequency;
index2 = i;
}
}
// 把最小的和次小的构建为一个树
Node* parent = createNode('\0', nodes[index1]->frequency + nodes[index2]->frequency);
parent->left = nodes[index1];
parent->right = nodes[index2];
// parent放进去,原孩子删掉,最后一个往前移,node数量--
nodes[index2] = parent;
nodes[index1] = nodes[nodeCount - 1];
nodeCount--;
}
return nodes[0];
}
// 编写huffman编码表及打印
void printHuffmanCodes(Node* root, int code[], int top, int codeTable[][256], int codeLengths[]) {
// root根结点 code当前字符的huffman函数 top当前字符的树的深度/huffman编码长度
// codeTable所有字符的huffman编码 codeLengths 所有字符的huffman编码长度
if (root->left) { // 有左子结点
code[top] = 0;
printHuffmanCodes(root->left, code, top + 1, codeTable, codeLengths);
}
if (root->right) { // 有右子节点
code[top] = 1;
printHuffmanCodes(root->right, code, top + 1, codeTable, codeLengths);
}
if (root->left == NULL && root->right == NULL) { // 是叶子节点
codeLengths[(int)root->data] = top; // 字符root->data的编码长度为top
printf("%c:",root->data); // 输出字符root->data
for (int i = 0; i < top; i++) { // 输出字符root->data的编码
codeTable[(int)root->data][i] = code[i];
printf("%d",code[i]);
}
printf("\n");
}
}
// 编码函数
void encodeText(Node* root, char* inputText, char encodedText[], int codeTable[][256], int codeLengths[]){
// 翻译inputText为huffman编码encodedText
int length = strlen(inputText);
int i, j;
for (i = 0; i < length; i++) {
char character = inputText[i]; // 当前处理的字符
int length = codeLengths[(int)character]; // 字符转化成huffman编码后的长度
for (j = 0; j < length; j++) {
encodedText[strlen(encodedText)] = codeTable[(int)character][j] + '0';
}
}
}
// 解码函数
void decodeText(Node* root, char* encodedText, char* decodedText) {
// 翻译huffman编码encodedText为decodedText
int length = strlen(encodedText);
int i = 0;
while (i < length) {
Node* current = root;
while (current->left != NULL || current->right != NULL) {
if (encodedText[i] == '0') {
current = current->left;
} else if (encodedText[i] == '1') {
current = current->right;
}
i++;
}
decodedText[strlen(decodedText)] = current->data;
}
decodedText[strlen(decodedText)] = '\0';
}
int main() {
char inputText[MAX] = "";
gets(inputText);
Node* root = buildHuffmanTree(inputText); // 建树
int code[256]; // 当前字符的huffman编码
int top = 0;
int codeTable[256][256] = {0}; // 所有字符的huffman编码
int codeLengths[256] = {0}; // 所有字符的编码长度
printf("Huffman Codes:\n");
printHuffmanCodes(root, code, top, codeTable, codeLengths);
printf("\n");
printf("InputText:\n%s\n\n",inputText);
// 字符转huffman
char encodedText[1000] = "";
encodeText(root, inputText, encodedText, codeTable, codeLengths);
printf("Encoded Text: \n%s\n\n", encodedText);
// huffman转字符
char decodedText[1000] = "";
decodeText(root, encodedText, decodedText);
printf("Decoded Text: \n%s\n\n", decodedText);
return 0;
}
链式前向星
struct Edge{
int to, w, next; //终点,权值,前驱
} e[E_MAX];
int cnt_E = 0;
int head[V_MAX]; //需要先初始化为-1
void intList(int n){
memset(head, -1, sizeof(head));
}
void addEdge(int x, int y, int w){
e[cnt_E].to = y; //保存终点
e[cnt_E].next = head[x]; //添加链接
head[x] = cnt_E++; //更新表头
}
BFS广度优先搜索
邻接矩阵
时间复杂度
#include <bits/stdc++.h>
#define MaxV (10000+10)
using namespace std;
int G[MaxV][MaxV]; // 邻接矩阵
bool visited[MaxV];
int last[MaxV], d[MaxV]; // last[i]点i的前驱结点 d[i]点i的深度
void BFS(int i, int n);
void printPath(int s, int v);
int main(){
int n, m;
scanf("%d%d", &n, &m); // n顶点数 m边数
for(int i=0; i<m; i++){
int u, v;
scanf("%d%d", &u, &v);
G[u][v] = 1;
}
BFS(1, n);
for(int i=2; i<=n; i++){ // 如果是非连通图,该循环保证每个极大连通子图中的顶点都能被遍历到
if(!visited[i])
BFS(i,n);
}
puts("");
printPath(1, 4); // 打印从点1到点4的路径
puts("");
printf("%d", d[4]); // 打印点4的高度
return 0;
}
void BFS(int i, int n){ // i起始顶点 n顶点总数
queue<int> Q; // 待访问的顶点
Q.push(i); // 当前节点
visited[i] = true; // 当前节点被visited过了
printf("v%d->", i);
while(!Q.empty()){
int k = Q.front();
Q.pop();
for(int j=1; j<=n; j++){
if(G[k][j] == 1 && !visited[j]){
Q.push(j); // 当前节点
visited[j] = true; // 当前节点被visited过了
printf("v%d->", j);
d[j] = d[k]+1;
last[j] = k;
}
}
}
}
void printPath(int s, int v){ // s起始顶点 v终点
if(v == s){
printf("%d ", s);
}else if(last[v] == 0){
printf("No path from %d to %d exists", s, v);
}else{
printPath(s, last[v]);
printf("%d ", v);
}
}
邻接表
时间复杂度
#include <bits/stdc++.h>
#define MaxV (10000+10)
using namespace std;
typedef struct edge{ // 定义边结点类型
int adjvex; //指向的点
int weight; //边的权重
struct edge *next; //相邻的边
}ELink;
typedef struct ver{ // 定义顶点结点类型
int vertex; //顶点id
ELink* link; //从此顶点出发的边
}VLink;
VLink G[MaxV];
bool visited[MaxV];
int last[MaxV], d[MaxV]; // last[i]点i的前驱结点 d[i]点i的深度
void BFS(int i, int n);
void printPath(int s, int v);
int main(){
int n, m;
scanf("%d%d", &n, &m); // n顶点数 m边数
for(int i=0; i<m; i++){
int u, v;
scanf("%d%d", &u, &v); // u到v有边,有向的
ELink* e = (ELink*) malloc(sizeof (ELink));
e->adjvex = v, e->weight = 0, e->next = nullptr;
if(G[u].link == nullptr){
G[u].link = e;
}else{
e->next = G[u].link;
G[u].link = e;
}
}
BFS(1, n);
for(int i=2;i<=n;i++){ // 如果是非连通图,该循环保证每个极大连通子图中的顶点都能被遍历到
if(!visited[i])
BFS(i,n);
}
puts("");
printPath(1, 4); // 打印从点1到点4的路径
puts("");
printf("%d", d[4]); // 打印点4的高度
return 0;
}
void BFS(int i, int n){
queue<int> Q; // 待访问的顶点
ELink* p;
Q.push(i); // 当前节点
visited[i] = true; // 当前节点被visited过了
printf("v%d->", i);
while(!Q.empty()){
int k = Q.front();
Q.pop();
p = G[k].link;
while(p != nullptr){ // 如果队列头结点非空
int j = p->adjvex; // 头结点序号
if(!visited[j]){ // 没visited过当前节点
printf("v%d->", j);
visited[j] = true;
Q.push(j);
d[j] = d[k]+1;
last[j] = k;
}
p = p->next; // 下个节点
}
}
}
void printPath(int s, int v){
if(v == s){
printf("%d ", s);
}else if(last[v] == 0){
printf("No path from %d to %d exists", s, v);
}else{
printPath(s, last[v]);
printf("%d ", v);
}
}
DFS深度优先搜索
邻接矩阵
时间复杂度
#include <bits/stdc++.h>
#define MaxV (10000+10)
using namespace std;
int G[MaxV][MaxV]; // 邻接矩阵
bool visited[MaxV];
int last[MaxV], d[MaxV]; // last[i]点i的前驱结点 d[i]点i的深度
void DFS(int i, int n);
void printPath(int s, int v);
int main(){
int n, m; // n顶点数 m边数
scanf("%d%d", &n, &m);
for(int i=0; i<m; i++){
int u, v;
scanf("%d%d", &u, &v);
G[u][v] = 1;
}
DFS(1, n);
for(int i=2;i<=n;i++){ // 如果是非连通图,该循环保证每个极大连通子图中的顶点都能被遍历到
if(!visited[i])
DFS(i,n);
}
puts("");
printPath(1, 4); // 打印从点1到点4的路径
puts("");
printf("%d", d[4]); // 打印点4的高度
return 0;
}
void DFS(int i, int n){ // i当前结点 n总结点数量
printf("v%d->", i);
visited[i] = true;
for(int j=1; j<=n; j++){
if(G[i][j] == 1 && !visited[j]){
last[j] = i; // 前驱
d[j] = d[i]+1; // 深度
DFS(j, n);
}
}
}
void printPath(int s, int v){ // s起点 v终点
if(v == s){
printf("%d ", s);
}else if(last[v] == 0){
printf("No path from %d to %d exists", s, v);
}else{
printPath(s, last[v]);
printf("%d ", v);
}
}
邻接表
时间复杂度
#include <bits/stdc++.h>
#define MaxV (10000+10)
using namespace std;
typedef struct edge{ // 定义边结点类型
int adjvex; //指向的点
int weight; //边的权重
struct edge *next; //相邻的边
}ELink;
typedef struct ver{ // 定义顶点结点类型
int vertex; //顶点id
ELink* link; //从此顶点出发的边
}VLink;
VLink G[MaxV];
bool visited[MaxV];
int last[MaxV], d[MaxV];
void DFS(int i, int n);
void printPath(int s, int v);
int main(){
int n, m;
scanf("%d%d", &n, &m); // n顶点数 m边数
for(int i=0; i<m; i++){
int u, v; // u到v有边,有向的
scanf("%d%d", &u, &v);
ELink* e = (ELink*) malloc(sizeof (ELink));
e->adjvex = v, e->weight = 0, e->next = nullptr;
if(G[u].link == nullptr){
G[u].link = e;
}else{
e->next = G[u].link;
G[u].link = e;
}
}
DFS(1, n);
for(int i=2;i<=n;i++){ // 如果是非连通图,该循环保证每个极大连通子图中的顶点都能被遍历到
if(!visited[i])
DFS(i,n);
}
puts("");
printPath(1, 4); // 打印从点1到点4的路径
puts("");
printf("%d", d[4]); // 打印点4的高度
return 0;
}
void DFS(int i, int n){ // i当前结点 n总结点数量
ELink* p;
printf("v%d->", i);
visited[i] = true;
p = G[i].link;
while(p != NULL){
int j = p->adjvex;
if(!visited[j]){
last[j] = i; // 前驱
d[j] = d[i]+1; // 深度
DFS(j, n);
}
p = p->next;
}
}
void printPath(int s, int v){ // s起点 v终点
if(v == s){
printf("%d ", s);
}else if(last[v] == 0){
printf("No path from %d to %d exists", s, v);
}else{
printPath(s, last[v]);
printf("%d ", v);
}
}
拓扑排序
拓扑排序:对于有向无环图
#include <bits/stdc++.h>
using namespace std;
#define MAX_VERTICES 10010 // 定义图的最大顶点数
unordered_map<int, vector<int>>graph; // 定义图的结构
struct Edge { //链式前向星,存边的起点、终点、和前驱
int from, to, next;
} e[MAX_VERTICES];
int cnt; //存储的边数
int main() {
int t;
scanf("%d", &t);
while(t--){
int head[MAX_VERTICES] = {}; //下标是起点的表头,存第一个边的编号,初始化为 -1
int id[MAX_VERTICES]={}; //每个点的入度
memset(head, -1, sizeof(head));
graph.clear();
int n, m;
cnt = 1;
scanf("%d%d", &n, &m);
// 读入
for (int i = 1; i <= m; i++) {
int from, to;
scanf("%d%d", &from, &to);
e[cnt].from = from; //起点
e[cnt].to = to; //终点
e[cnt].next = head[from]; //添加
id[to]++;
head[from] = cnt++; //更新表头
graph[from].push_back(to);
}
// 拓扑排序
priority_queue<int> q; // 对于拓扑排序不唯一的情况,先输出序号大的点,再输出序号小的点,即输出字典序最大的拓扑排序
for (int i=1; i<=n; i++) {
if (id[i] == 0)
q.push(i); //把入度为0的点入队
}
vector<int> ans; //数组保存结果
while (!q.empty()) {
int x = q.top(); //出队
q.pop();
ans.push_back(x);
int edge = head[x];
while (edge != -1) {
id[e[edge].to]--; //删除边
if (id[e[edge].to] == 0) //把入度为0的点入队
q.push(e[edge].to);
edge = e[edge].next;
}
}
// 输出形成的拓扑序列
for(int an : ans){
printf("%d ", an);
}
}
return 0;
}
单源最短路径
1 Bellman-Ford算法
- 权重可以为负,可以有回路。时间复杂度
#include<iostream>
#include<cstdio>
using namespace std;
#define MAX 0x3f3f3f3f
#define N 1010
int nodenum, edgenum, original; //点,边,起点
typedef struct Edge{ //边
int u, v; // 起点 终点
int cost; // 权重
}Edge;
Edge edge[N];
int dis[N], pre[N]; // dis源点到每个顶点的最短距离,pre最短路径的前驱节点
bool Bellman_Ford();
void print_path(int root);
int main(){
scanf("%d%d%d", &nodenum, &edgenum, &original);
pre[original] = original; // 初始化源点的前驱为自己
for(int i = 1; i <= edgenum; ++i){
scanf("%d%d%d", &edge[i].u, &edge[i].v, &edge[i].cost);
}
if(Bellman_Ford())
for(int i = 1; i <= nodenum; ++i){ //每个点最短路
printf("%d\n", dis[i]); // 输出源点到该顶点的最短距离
printf("Path:");
print_path(i); // 打印路径
}
else // 如果存在负权回路,输出提示信息
printf("have negative circle\n");
return 0;
}
bool Bellman_Ford(){
for(int i = 1; i <= nodenum; ++i) //初始化
dis[i] = (i == original ? 0 : MAX);
for(int i = 1; i <= nodenum - 1; ++i) // n-1遍
for(int j = 1; j <= edgenum; ++j)
if(dis[edge[j].v] > dis[edge[j].u] + edge[j].cost){ //松弛
dis[edge[j].v] = dis[edge[j].u] + edge[j].cost;
pre[edge[j].v] = edge[j].u; // 更新前驱节点
}
bool flag = true; // 标记是否存在负权回路 false为有
for(int i = 1; i <= edgenum; ++i)
if(dis[edge[i].v] > dis[edge[i].u] + edge[i].cost){
// 如果还能松弛,则存在负权回路
flag = false;
break;
}
return flag;
}
void print_path(int root){ // 打印最短路的路径(反向)
while(root != pre[root]){ // 前驱
printf("%d-->", root);
root = pre[root];
}
if(root == pre[root])
printf("%d\n", root);
}
2 有向无环图中的单源最短路径问题
权重可以为负,不能有回路。时间复杂度
#include <bits/stdc++.h>
using namespace std;
#define MAX_VERTICES 10010 // 定义图的最大结点数
#define MAX_EDGE 10010 // 定义图的最大边数
typedef struct edge{ // 定义边结点类型
long long adjvex; //指向的点
long long weight; //边的权重
struct edge *next; //相邻的边
}ELink;
typedef struct ver{ // 定义顶点结点类型
long long vertex, id, d, last;
// 编号 入度 到源点的距离 最短路径中的前驱结点
ELink* link; // 与顶点相连的第一个边结点的指针
}VLink;
// 定义图的结构
VLink G[MAX_VERTICES];
void InitializeSingleSource(long long n, long long s);
void Relax(long long u, long long v, ELink* edge);
int main() {
int t;
scanf("%d", &t);
while(t--){
int n, m, s;
scanf("%d%d%d", &n, &m, &s); // 顶点数 边数 源点
for(int i=0; i<m; i++){
long long u, v, w;
scanf("%lld%lld%lld", &u, &v, &w);
ELink* e = (ELink*) malloc(sizeof (ELink));
e->adjvex = v, e->weight = w, e->next = nullptr;
if(G[u].link == nullptr){
G[u].link = e;
}else{
e->next = G[u].link;
G[u].link = e;
}
G[v].id++;
}
// 拓扑排序
queue<long long > q;
for (int i = 1; i <= n; i++) {
if (G[i].id == 0)
q.push(i); //把入度为0的点入队
}
vector<long long > ans; // 拓扑排序结果
while (!q.empty()) {
long long x = q.front();
q.pop();
ans.push_back(x);
ELink* edge = G[x].link;
while (edge != nullptr) {
G[edge->adjvex].id--;
if (G[edge->adjvex].id == 0) //把入度为0的点入队
q.push(edge->adjvex);
edge = edge->next;
}
}
InitializeSingleSource(n, s); // 初始化
// 松弛结点
for(long long an: ans){
VLink now = G[an];
ELink* temp = now.link;
while (temp != nullptr) {
Relax(an, temp->adjvex, temp);
temp = temp->next;
}
}
// 输出结果
for(long long an: ans){
printf("%lld:%lld ", an, G[an].d);
// 输出每个顶点到源点的最短距离
}
}
return 0;
}
void InitializeSingleSource(long long n, long long s){
for(int i=1; i<=n; i++){
G[i].d = LONG_LONG_MAX;
}
G[s].d = 0;
}
void Relax(long long u, long long v, ELink* edge){
if(G[v].d > G[u].d+edge->weight){
G[v].d = G[u].d+edge->weight; // 更新距离
G[v].last = u; // 更新前驱
}
}
3 Dijkstra算法
- 非负权重的图,可以有回路。时间复杂度
标准版
#include <iostream>
#include <vector>
#include<queue>
#define MaxV 2005
using namespace std;
struct Edge {
int to;
int weight;
// 构造函数,初始化目标顶点和权重
Edge(int t, int w) :to(t), weight(w) {}
};
//graph用邻接表表示的图 src源节点
vector<int>dijkstra(const vector<vector<Edge>>& graph, int src) {
//储存各个顶点到src顶点的距离
vector<int>dis(MaxV, INT_MAX);
//记录访问过的顶点
vector<bool>vis(MaxV, false);
//用优先级队列来处理距离最短的顶点,pair<int,int>的第一个int存储距离,第二个int存储顶点;
//底层用vector来存储这个队列;greater表示从小到大排
priority_queue<pair<int,int>,vector<pair<int,int> >,greater<pair<int,int> > >pq;
//src顶点到自己的距离为0
dis[src] = 0;
pq.push({0,src});
while (!pq.empty()) {
//v表示当前距离最短的顶点
int v = pq.top().second; pq.pop();
//若是访问过当前顶点则跳过
if (vis[v]) continue;
vis[v] = true;
//访问邻接顶点
for (const auto&edge: graph[v]) {
int t = edge.to;
int w = edge.weight;
if (!vis[t] && w+dis[v]<dis[t]) {
dis[t] = w + dis[v];
pq.push({ dis[t],t });
}
}
}
return dis;
}
int main() {
int n, m, source; // 顶点数 边数 源点
scanf("%d%d%d", &n, &m, &source);
vector<vector<Edge>>graph(MaxV);
for(int i=0; i<m; i++){
int u, v, w;
scanf("%d%d%d", &u, &v, &w);
graph[u].push_back(Edge(v,w)); // 有向图 u到v权重为w
}
vector<int>shortest_path = dijkstra(graph, source); // 起点source
cout << shortest_path[3]; // 顶点source到顶点3的最短路径长度
return 0;
}
所有结点对的最短路径问题
floyd算法
空间复杂度
#include <stdio.h>
#include <limits.h>
#define V 310 // 图中节点的数量
long long dist[V][V], graph[V][V], Path[V][V];
// dist两点间的最短距离 graph图的邻接矩阵 Path最短路径的中转点
void floydWarshall();
void PrintPath(long long u, long long v);
int main() {
int n, m; // 顶点数 边数
scanf("%d%d", &n, &m);
for(int i=0; i<m; i++){
long long u, v, w; // 起点、终点和权重
scanf("%lld%lld%lld", &u, &v, &w);
if((graph[u][v]!=0 && w<graph[u][v]) || graph[u][v] == 0){
// 考虑到可能有重复边
graph[u][v] = w;
}
}
floydWarshall();
int q; // q次询问
scanf("%d", &q);
while(q--){
int u, v;
scanf("%d%d", &u, &v); // 询问的起点和终点
if(u == v){ // u和v是同一个点,距离为0
printf("%d->%d: 0\n", u, v);
}else if(dist[u][v] == LONG_LONG_MAX){ // u不可达v,输出-1
printf("%d->%d: -1\n", u, v);
}else{ // u可达v
printf("%d->%d: %lld\n", u, v, dist[u][v]); // 最短距离
PrintPath(u, v); // 打印最短路径
}
}
return 0;
}
void floydWarshall() {
// 初始化最短路径矩阵
for (int i = 0; i < V; i++)
for (int j = 0; j < V; j++){
if(graph[i][j] != 0){
dist[i][j] = graph[i][j];
}else{
dist[i][j] = LONG_LONG_MAX;
}
if(dist[i][j] < LONG_LONG_MAX && i != j){
Path[i][j] = j; // 初始化路径为直接连接
}else{
Path[i][j] = -1;
}
}
// 更新最短路径矩阵
for (int k = 0; k < V; k++) { // 遍历所有节点作为中转点
for (int i = 0; i < V; i++) { // 遍历所有起点
for (int j = 0; j < V; j++) { // 遍历所有终点
if (dist[i][k] != LONG_LONG_MAX && dist[k][j] != LONG_LONG_MAX && dist[i][k] + dist[k][j] < dist[i][j]) {
// 如果通过k点可以使i到j的距离更短,松弛
dist[i][j] = dist[i][k] + dist[k][j];
Path[i][j] = k; // 更新路径的中转点为k
}
}
}
}
}
// 打印最短路径
void PrintPath(long long u, long long v){
printf("%lld ", u); // 打印起点
while(Path[u][v] != v){ // 当中转点不是终点时
printf("%lld ", Path[u][v]); // 打印中转点
u = Path[u][v]; // 更新起点为中转点
}
printf("%lld\n", v); // 打印终点
}
有向图的传递闭包
- 传递闭包:
如 果 图 中 包 含 一 条 从 结 点 到 结 点 的 路 径 - 用于解决问题:给定有向图,判断对于所有结点对i和j,图G是否包含一条从结点i到结点j的路径
时间复杂度:
法1:floyd算法每条边权重赋1
法2
#include <cstdio>
#define V 310 // 图中节点的数量
long long dist[V][V]; // dist[i][j] i到j的可达性
void floydWarshall();
int main() {
int n, m;
scanf("%d%d", &n, &m);
for(int i=0; i<m; i++){
long long u, v, w;
scanf("%lld%lld%lld", &u, &v, &w);
dist[u][v] = 1;
}
floydWarshall();
int q; // q次询问
scanf("%d", &q);
while(q--){
int u, v;
scanf("%d%d", &u, &v);
if(dist[u][v]){ // u可达v,输出1
printf("%d->%d: 1\n", u, v);
}else{ // u不可达v,输出0
printf("%d->%d: 0\n", u, v);
}
}
return 0;
}
void floydWarshall() {
// 初始化最短路径矩阵
for (int i = 0; i < V; i++)
dist[i][i] = 1;
// 更新最短路径矩阵
for (int k = 0; k < V; k++) { // 遍历所有节点作为中转点
for (int i = 0; i < V; i++) { // 遍历所有起点
for (int j = 0; j < V; j++) { // 遍历所有终点
dist[i][j] = dist[i][j] | (dist[i][k] & dist[k][j]);
}
}
}
}
经过固定点的最短路径
最大流
Edmonds-Karp算法
时间复杂度
#include <bits/stdc++.h>
using namespace std;
const int N=210;// 最大节点数量
const int INF=0x7FFFFFFF;
int n,m; // n为节点数,m为汇点编号
int map0[N][N]; // 残留图,表示每条有向边的容量
int pi[N]; //BFS的前驱图
int flow_in[N]; //流入i的最大流量是flow_in[i]
int start,end0; // 源点和汇点
queue<int> q;
int bfs();
int Edmonds_Karp();
int main(){
int i,u,v,cost;
while(scanf("%d%d",&n,&m)!=EOF){ // 读取节点数和汇点编号
memset(map0,0,sizeof(map0));
for(i=0;i<n;i++){
scanf("%d%d%d",&u,&v,&cost);
map0[u][v]+=cost; // 更新残留图的容量
}
start=1,end0=m; // 1是源点,m是汇点
printf("%d\n",Edmonds_Karp());
}
return 0;
}
int bfs(){
int i,t;
while(!q.empty()) q.pop();
memset(pi,-1,sizeof(pi));
pi[start]=0; // 源点的前驱为自己
flow_in[start]=INF;
q.push(start);
while(!q.empty()){
t=q.front();
q.pop();
if(t==end0) break; // 已经走到汇点,循环结束
for(i=1;i<=m;i++){
if(pi[i]==-1 && map0[t][i]){ // 节点i未被访问且t到i有边
flow_in[i] = min(flow_in[t], map0[t][i]); // 更新流入i的最大流量
q.push(i);
pi[i]=t; // i的前驱结点为t
}
}
}
if(pi[end0]==-1) return -1; // 如果汇点未被访问,说明没有增广路径
else return flow_in[m]; // 返回增广路径的流量
}
int Edmonds_Karp(){
int max_flow_in=0; // 流f的流值|f|
int cf_p; // 增广路径的残留容量Cf(p)
while((cf_p=bfs())!=-1){ // 当还有增广路径时
//1. 流值|f|增加本次增广路径的残留容量cf_p
max_flow_in+=cf_p;
//2. 更新残留图
int now=end0;
while(now!=start){
int pre=pi[now]; // 获取前驱节点
map0[pre][now]-=cf_p; //更新正向边的实际容量
map0[now][pre]+=cf_p; //添加反向边
now=pre; // 移动到前驱节点
}
}
return max_flow_in; // 返回最大流
}
Dinic算法
时间复杂度
- 第一行一个正整数 T(1≤T≤10),表示数据组数。
- 对于每组数据,第一行四个正整数 n,m,s,t(1≤n≤100,1≤m≤5×10^3,1≤s,t≤n),n个点,m条边,计算从s到t的最大流。
- 接下来 m 行,每行三个正整数 ui,vi,wi(1≤ui,vi≤n,0≤wi<2^31),表示第 i 条有向边 ui→vi 的最大容量为 wi。
- 图中有可能存在重边和自环。
#include <algorithm>
#include <cstring>
#include <iostream>
#include <queue>
using namespace std;
typedef long long ll;
const int V_MAX = 205; // 最大顶点数
const int E_MAX = 5005; // 最大边数
const ll LL_INF = 0x3f3f3f3f3f3f3f3f;
ll max_stream = 0; // 最大流
int cnt_E = 0;
int n, m, s, t;
struct Edge {
int to; // 边的目标顶点
int nxt; // 下一条边的索引
ll val; // 边的容量
} e[E_MAX * 2]; // 边数组,每条边对应一条正向边和一条反向边
int head[V_MAX]; // 邻接表的头指针数组
int depth[V_MAX]; // 每个顶点的层次
void addEdge(int x, int y, int w);
void read();
bool bfs();
ll Dinic();
int main() {
int T;
cin >> T;
while(T--){
cin >> n >> m >> s >> t; // 顶点数 边数 源点 汇点
cnt_E = 0, max_stream = 0; // 初始化边计数器和最大流
fill(head + 1, head + 1 + n, -1);
read();
cout << Dinic() << '\n';
}
return 0;
}
void addEdge(int x, int y, int w) {
e[cnt_E].to = y;
e[cnt_E].val = w;
e[cnt_E].nxt = head[x];
head[x] = cnt_E++;
}
void read() {
int u, v, w;
for (int i = 0; i < m; i++) {
cin >> u >> v >> w;
addEdge(u, v, w); // 添加正向边
addEdge(v, u, 0); // 添加反向边,容量为0
}
}
bool bfs() { // bfs用于获得层次(分层图)
memset(depth, 0, sizeof(depth));
depth[s] = 1; // 源点的层次为1
queue<int> q;
q.push(s); // 将源点加入队列
while (!q.empty()) {
int u = q.front();
q.pop();
for (int i = head[u]; i > -1; i = e[i].nxt) {
int v = e[i].to;
if (e[i].val && !depth[v]) { // 边有剩余容量且目标顶点未访问
depth[v] = depth[u] + 1; // 更新目标顶点的层次
q.push(v); // 将目标顶点加入队列
}
}
}
if (depth[t] != 0) // 如果汇点可达
return true; // 返回true表示存在增广路径
return false;
}
ll dfs(int pos, ll in) { // DFS用于寻找增广路径并计算流量
if (pos == t) // 如果当前顶点是汇点,则返回当前流量
return in;
ll out = 0; // 初始化当前顶点的流出量为0
for (int u = head[pos]; u > -1 && in; u = e[u].nxt) {
int v = e[u].to;
// 如果边有剩余容量且目标顶点的层次恰好是当前顶点层次加1
if (e[u].val && depth[v] == depth[pos] + 1) {
// 递归调用dfs寻找增广路径,并计算可以流过当前边的流量
ll res = dfs(v, min(e[u].val, in));
e[u].val -= res; // 更新正向边的容量
e[u ^ 1].val += res; // 更新反向边的容量
in -= res; // 减少当前流量
out += res; // 增加流出量
}
}
if (out == 0)
// 如果当前顶点没有流出量,则将其层次设为0,表示在后续的BFS中不会再访问
depth[pos] = 0;
return out;
}
ll Dinic() {
while (bfs()) // 存在增广路径
max_stream += dfs(s, LL_INF);
return max_stream;
}
最大二分匹配
Dinic最小割/最大流算法
时间复杂度
// 最大流等于最小割
#include<iostream>
#include<algorithm>
#include<cstring>
#include<queue>
using namespace std;
const int N = 1e3+10, M = 5e5+1e4+10, INT = 0x3f3f3f3f;
// 最大节点数(至少n+m+2) 最大边数(至少最大边数+n+m,因为有源点汇点的边) 无穷大常量
int e[M], ne[M], f[M], h[N], idx;
// e边的终点 ne下一条边的索引 f边的容量 h每个节点边的起始索引 idx边的索引
int cur[N], d[N]; // cur当前弧优化 d节点层次
// 弧优化通过记录每次DFS搜索的断点,使得下一次DFS可以直接从上次搜索的断点继续,从而跳过那些已经饱和的边
int n, m, eNum, S, T; // n: 节点数, m: 边数, S: 源点, T: 汇点
void add(int a, int b, int c);
int dinic();
bool bfs();
int dfs(int u, int lim);
int main(){
scanf("%d%d%d", &n, &m, &eNum);
S = 0, T = n + m + 1; // 设置源点和汇点
memset(h, -1, sizeof h);
for (int i = 1; i <= n; i++) add(S, i, 1); // 添加源点到左侧点的边
for (int i = n + 1; i <= n+m; i++) add(i, T, 1); // 添加右侧点到汇点的边
for(int i = 1; i <= eNum; i++){
int a, b;
scanf("%d%d", &a, &b);
add(a, b+n, 1); // 起点 终点 容量为1
}
cout << dinic() << "\n"; // 输出二分图最大匹配的边数
for(int i=0;i<idx;i+=2) // 输出二分图匹配的点对
{
if(e[i]>n && e[i]<=n+m && !f[i]) // 是右侧的边且剩余容量为0(这条边在最大流中已经被完全使用)
{
printf("%d %d\n",e[i^1],e[i]-n); // 左侧的点 右侧的点
}
}
return 0;
}
void add(int a, int b, int c){ // a: 起点, b: 终点, c: 容量
e[idx] = b, f[idx] = c, ne[idx] = h[a], h[a] = idx++; // 添加正向边
e[idx] = a, f[idx] = 0, ne[idx] = h[b], h[b] = idx++; // 添加反向边,容量为0
}
// Dinic算法主函数
int dinic(){
int r = 0, flow; // 初始化最大流为0
while(bfs()) // 当BFS可以构建分层图时
while(flow = dfs(S, INT))
r += flow; // 通过DFS寻找增广路径并累加流量
return r; // 返回最大流
}
// BFS用于分层图构建
bool bfs(){
queue<int> q;
q.push(S); // 将源点加入队列
memset(d, -1, sizeof d);
d[S] = 0, cur[S] = h[S]; // 源点的层次为0,初始化当前弧
while(q.size()){
int t = q.front(); q.pop();
for(int i = h[t]; ~i; i = ne[i]){ // 遍历所有邻接边
int ver = e[i]; // 邻接边的终点
if(d[ver] == -1 && f[i]){ // 如果终点未访问且正向边有容量
d[ver] = d[t] + 1; // 更新终点层次
cur[ver] = h[ver]; // 初始化当前弧
if(ver == T) return true; // 如果到达汇点,返回true
q.push(ver); // 将终点加入队列
}
}
}
return false; // 如果无法到达汇点,返回false
}
// DFS用于寻找增广路径
int dfs(int u, int lim){
if(u == T) return lim; // 如果到达汇点,返回剩余流量
int flow = 0; // 初始化当前节点的流量为0
for(int i = cur[u]; ~i && flow < lim; i = ne[i]){ // 遍历当前节点所有邻接边
int ver = e[i]; // 邻接边的终点
cur[u] = i; // 更新当前弧
if(d[ver] == d[u] + 1 && f[i]){ // 如果终点层次正确且正向边有容量
int t = dfs(ver, min(f[i], lim - flow)); // 递归寻找增广路径
if(!t)
d[ver] = -1; // 如果无法增广,更新终点层次为-1
f[i] -= t, f[i^1] += t, flow += t; // 更新正向边和反向边的容量,累加流量
}
}
return flow; // 返回当前节点的流量
}
匈牙利算法
#include<bits/stdc++.h>
using namespace std;
const int N=555; // 定义最大可能的节点数
vector<int> G[N]; // 邻接表,用于存储每个男生的认识的女生的列表
int match[N],vis[N];
// match用于存储谁(i)和谁(match[i])匹配
// vis用于存储当前这一边搜索是否已经让某个男生找过增广路了
bool used[N][N]; // 用于标记某个男生和女生之间是否有边
bool hungary(int p,int op);
int main(){
int n,m,e,a,b; // n男生数 m女生数 e边数 a男生编号 b女生编号
scanf("%d%d%d",&n,&m,&e);
while(e--){
scanf("%d%d",&a,&b); //a范围1~n b范围1~m
if(used[a][b]) //判重边
continue;
used[a][b]=true;
G[a].push_back(b);
}
int ans=0;
for(int i=1;i<=n;i++)
if(hungary(i,i)) // 第i个男生,同时也是第i次搜寻
ans++;
printf("%d\n",ans);
return 0;
}
bool hungary(int p,int op){ // p表示第几个男生,op表示第几趟匹配
if(vis[p]==op) // 如果当前男生在当前轮次已经找过增广路径,返回false
return false;
vis[p]=op;
for(int i:G[p]){ // 对于每个男生p,遍历一遍他认识的女生
if(!match[i]||hungary(match[i],op)){
// 如果当前的女生没被匹配到,自然可以直接让她与当前的男生p进行匹配
// 如果已经被匹配过,则尝试让匹配她的那个男生去再找找看其他女生(开始套娃),
// 如果返回true也可以正常匹配
match[i]=p;
return true;
}
}
return false;
}
最小生成树
prim-朴素版
#include<cstring>
#include<iostream>
#include<algorithm>
using namespace std;
const int N = 2005,M = 5005,INF = 0x3f3f3f3f;
// N最大节点数 M最大边数 INF无穷大
int n,m;
int g[N][N]; // g为图的邻接矩阵,存储所有节点之间的边权重
int dist[N]; // dist存储从已选节点集合到未选节点集合的最小距离
bool used[N];// used标记节点是否已被添加到最小生成树中
int prim();
int main(){
scanf("%d%d",&n,&m); // 读取节点数和边数
//重要
memset(g,0x3f,sizeof(g));
for(int i = 0;i < m; i++){
int u,v,w; // 读取边(u, v)的权重w
scanf("%d%d%d",&u,&v,&w);
g[u][v] = g[v][u] = min(g[u][v],w); // 更新邻接矩阵,保证是无向图且权重最小
}
int r = prim(); // 调用prim函数计算最小生成树的权重和
printf("%d",r);
return 0;
}
int prim(){ // 返回最小生成树的权重和
memset(dist,0x3f,sizeof dist);
int res = 0; // res用于存储最小生成树的权重和
for(int i = 0;i < n;i++){
int t = -1; // t用于存储当前未选节点中距离已选节点集合最近的节点
for(int j = 1;j <= n; j++){
if((!used[j]) && (t == -1 || dist[t] > dist[j]))
t = j;
}
used[t] = true;
// 如果不是第一个节点且距离为无穷大,说明图不连通,返回无穷大
if(i && dist[t] == INF) return INF;
if(i)res += dist[t]; // 如果不是第一个节点,累加到res中
for(int j = 1;j <= n;j++){ // 更新未选节点的距离
if(!used[j])
dist[j] = min(dist[j],g[t][j]);
}
}
return res;
}
prim-堆优化
#include <bits/stdc++.h>
using namespace std;
#define INF 2147483647
#define N (100000+10)
typedef pair<int,int>pii;
struct cmp{
//自定义排序方法 因为我定义的优先队列里,边权和是第二个元素,如果直接greater,它会默认按第一个元素排序
bool operator()(pii &a,pii &b){
return a.second>b.second;
}
};
vector<pii>e[N]; // 邻接表,e[i] 存储与节点 i 相连的边和对应的权重
int d[N],vis[N],cnt,sum,n,m;
// d存储最小距离,vis标记节点是否已访问,cnt计数,sum总权重,n节点数,m边数
priority_queue <pii,vector<pii>,cmp > q; // 优先队列,用于存储和获取最小边
void add_edge(int x, int y, int z);
void init(int n);
void prim();
int main(){
scanf("%d%d",&n,&m); // 节点数n 边数m
init(n);
for(int i=1; i<=m; i++){
int x,y,z; // 边(x, y)的权重z
scanf("%d%d%d",&x,&y,&z);
add_edge(x,y,z);
}
prim(); // 调用prim函数计算最小生成树的权重和
if (cnt==n) printf("%d",sum); // 有最小生成树
else printf("orz"); // 否则输出"orz",表示图不连通
}
void add_edge(int x, int y, int z){ //邻接表存图
e[x].push_back(make_pair(y, z));
e[y].push_back(make_pair(x, z)); // 无向图,添加边(y, x)权重z
}
void init(int n){ //初始化
for (int i = 1; i <= n; i++) e[i].clear();
for (int i = 1; i <= n; i++) d[i] = INF;
}
void prim(){
d[1]=0; // 从节点1开始,将其距离设为0
q.push(make_pair(1,0)); // 将节点1和距离0加入优先队列
while(!q.empty() && cnt<n){ // 当队列不为空且处理过的节点数小于n时
int now=q.top().first; // 当前处理的节点
int dis=q.top().second; // 当前节点的最小距离
q.pop(); // 弹出当前节点
if(vis[now]) continue; // 如果当前节点已访问,跳过
cnt++; // 计数增加
sum += dis; // 累加到总权重
vis[now] = 1; // 标记当前节点为已访问
for(int i=0; i<e[now].size(); i++){ // 遍历当前节点的所有邻接边
int v=e[now][i].first; // 邻接节点
if(d[v]>e[now][i].second){ // 如果找到更小的距离
d[v]=e[now][i].second; // 更新最小距离
q.push(make_pair(v,d[v])); // 将新距离和节点加入优先队列
}
}
}
}
kruskal
#include <algorithm>
#include <iostream>
#define V_MAX 300005 // 定义最大顶点数
#define E_MAX 500005 // 定义最大边数
using namespace std;
typedef long long ll;
struct Edge {
int x, y, w; // 起点 终点 权重
bool operator<(const Edge &b) const { return w < b.w; }
} e[E_MAX];
int v[V_MAX]; // 并查集数组,用于存储每个顶点的父节点
int Find(int x); // 查找元素x所在集合的代表元素
bool isUnion(int x, int y); // 判断两个元素是否在同一个集合中
void Union(int x, int y); // 合并两个集合
void makeSet(int n); // 初始化并查集
int main() {
int n, m;
cin >> n >> m; // n为顶点数,m为边数
makeSet(n);
for (int i = 0; i < m; i++)
cin >> e[i].x >> e[i].y >> e[i].w;
sort(e, e + m); // 按权重从小到大对边进行排序
int cnt = 0; // 已加入最小生成树的边数
ll sum = 0; // 最小生成树的总权重
for(int i = 0; cnt < n - 1; i++){ // 循环直到找到n-1条边
if(isUnion(e[i].x, e[i].y)) // 如果两个顶点已经在同一个集合中,跳过这条边
continue;
cnt++;
sum += e[i].w;
Union(e[i].x, e[i].y);
}
cout << sum; // 输出最小生成树的总权重
return 0;
}
void makeSet(int n) { // 初始化并查集,每个顶点自成一个集合
for (int i = 1; i <= n; i++)
v[i] = i; // 初始化顶点i的父节点为自身
}
int Find(int x) { // 查找x所在集合的代表元素,并进行路径压缩
if (v[x] == x) // 如果x是代表元素,直接返回
return x;
return v[x] = Find(v[x]); // 否则递归查找并路径压缩
}
// 判断两个元素是否在同一个集合中
bool isUnion(int x, int y) { return Find(x) == Find(y); }
// 合并两个集合,将y所在集合的代表元素指向x所在集合的代表元素
void Union(int x, int y) { v[Find(y)] = Find(x); }
傅里叶变换
最高次数为n,次数界可以为n, n+1, n+2, 2n
对于次数界为n的多项式
多项式乘法-普通版
时间复杂度
#include <iostream>
#include <vector>
#include <cmath>
const double Pi = acos(-1);
const int MAX = 4000005; // 字符串最大长度
using namespace std;
typedef long long ll;
struct Complex {
double x, y; // 实部和虚部
Complex operator+(const Complex &b) const {
return {x + b.x, y + b.y};
}
Complex operator-(const Complex &b) const {
return {x - b.x, y - b.y};
}
Complex operator*(const Complex &b) const {
return {x * b.x - y * b.y, x * b.y + y * b.x};
}
} f[MAX], p[MAX], sav[MAX];
void dft(Complex *f, int len);
void idft(Complex *f, int len);
int main() {
int n, m;
cin >> n >> m; // 第一个多项式最多n次,第二个最多m次
for (int i = 0; i <= n; i++)
cin >> f[i].x; // 读入第一个多项式的系数
for (int i = 0; i <= m; i++)
cin >> p[i].x; // 读入第二个多项式的系数
for (m += n, n = 1; n <= m; n <<= 1); // 相乘最多n+m位
dft(f, n); // 对第一个多项式进行DFT
dft(p, n); // 对第二个多项式进行DFT
for (int i = 0; i < n; i++)
f[i] = f[i] * p[i]; // 点乘得到乘积的DFT
idft(f, n); // 对结果进行逆DFT
for (int i = 0; i <= m; i++)
cout << (int) (f[i].x / n + 0.49) << " "; // 四舍五入
return 0;
}
void dft(Complex *f, int len) {
if (len == 1)
return;
Complex *fl = f, *fr = f + len / 2; // 分治法,将数组分为两部分
for (int k = 0; k < len; k++)
sav[k] = f[k]; // 备份原数组
for (int k = 0; k < len / 2; k++) {
fl[k] = sav[k << 1]; // 分配偶数次的系数到左子数组
fr[k] = sav[k << 1 | 1]; // 分配奇数次的系数到右子数组
}
dft(fl, len / 2);
dft(fr, len / 2);
Complex tG = {cos(2 * Pi / len), sin(2 * Pi / len)}; // omega_n单位根
Complex buf = {1, 0}; // omega初始化旋转因子
for (int k = 0; k < len / 2; k++) {
sav[k] = fl[k] + buf * fr[k]; // 合并结果
sav[k + len / 2] = fl[k] - buf * fr[k];
buf = buf * tG; // omega = omega*omega_n更新旋转因子
}
for (int k = 0; k < len; k++)
f[k] = sav[k];
}
void idft(Complex *f, int len) {
if (len == 1)
return;
Complex *fl = f, *fr = f + len / 2;
for (int k = 0; k < len; k++)
sav[k] = f[k];
for (int k = 0; k < len / 2; k++) {
fl[k] = sav[k << 1];
fr[k] = sav[k << 1 | 1];
}
idft(fl, len / 2);
idft(fr, len / 2);
Complex tG = {cos(2 * Pi / len), -sin(2 * Pi / len)}; // 与dft唯一的区别
Complex buf = {1, 0};
for (int k = 0; k < len / 2; k++) {
sav[k] = fl[k] + buf * fr[k];
sav[k + len / 2] = fl[k] - buf * fr[k];
buf = buf * tG;
}
for (int k = 0; k < len; k++)
f[k] = sav[k];
}
多项式乘法-高效版/位逆序版
#include <iostream>
#include<bits/stdc++.h>
using namespace std;
const int maxn = 1000000 + 7;
#define PI acos(-1)
struct Complex {
double x, y; // 实部和虚部
Complex operator+(const Complex &b) const {
return {x + b.x, y + b.y};
}
Complex operator-(const Complex &b) const {
return {x - b.x, y - b.y};
}
Complex operator*(const Complex &b) const {
return {x * b.x - y * b.y, x * b.y + y * b.x};
}
};
int n,m; // 两个多项式的次数
Complex a[maxn*3], b[maxn*3]; // 存储多项式的系数
int pos[maxn*3]; // 定义位置数组,用于FFT中的位置交换
void FFT(Complex*A, int len, int type);
int main(){
int x;pos[0] = 0;
int maxLen = 1, l = 0; // maxLen为FFT的长度,l为log2(maxLen)
scanf("%d%d", &n, &m);
while(maxLen < n+m+1){
maxLen<<=1;
l++;
}
for(int i = 0;i<=n;i++){ // 第一个多项式的系数
scanf("%lf",&a[i].x);
}
for(int i = 0;i<=m;i++){ // 读取第二个多项式的系数
scanf("%lf",&b[i].x);
}
for(int i = 0;i<maxLen;i++){ // 求最后交换的位置(奇数特殊处理)
pos[i] = (pos[i>>1]>>1)|((i&1)<<(l-1));
// 计算每个索引i的位逆序位置(将一个数的二进制位顺序颠倒011->110)
// i>>1 将i的二进制位右移一位,即去掉最低位
// pos[i>>1]>>1 取i的前面所有位(去掉最低位)的位逆序,然后再右移一位
// (i&1)<<(l-1) 取i的最低位,并将其左移到最高位的位置
// 通过|操作将两部分合并,得到i的位逆序
}
FFT(a,maxLen,1);
FFT(b,maxLen,1);
for(int i = 0;i<maxLen;i++)
a[i] = a[i]*b[i];
FFT(a,maxLen,-1); // 对结果进行IDFT
for(int i=0; i<n+m+1; i++){
if(i!=0) printf(" ");
printf("%d",(int)(a[i].x+0.49));
}
printf("\n");
return 0;
}
// A为输入数组,len为长度,type为1表示DFT,-1表示IDFT
void FFT(Complex*A, int len, int type){
for(int i=0; i<len; i++){//将数组A中的元素按照位逆序的位置进行交换
if(i<pos[i])// 如果i已经小于其逆序位置pos[i],则说明这一对已经交换过
swap(A[i], A[pos[i]]);//保证每对只交换一次
}
for(int L=2; L<=len; L<<=1){//循环合并的区间长度
int HLen = L/2;//区间的一半
Complex Wn = {cos(2.0*PI/L), type*sin(2.0*PI/L)}; // 计算单位根
for(int R=0; R<len; R+=L){//每个小区间的起点
Complex w = {1,0}; // 初始化旋转因子
for(int k=0; k<HLen; k++, w=w*Wn){//求该区间下的值
Complex Buf = A[R+k];//蝴蝶操作,去掉odd和even数组,使变化原地进行
A[R+k] = A[R+k] + w*A[R+k+HLen];
A[R+k+HLen] = Buf - w*A[R+k+HLen];
}
}
}
if (type == -1) {
for (int i = 0; i < len; i++) {
A[i].x /= len;
A[i].y /= len;
}
}
}
// 位逆序代码
#include <iostream>
#include<bits/stdc++.h>
using namespace std;
const int maxn = 1000000 + 7;
#define PI acos(-1)
struct Complex {
int x, y; // 实部和虚部
Complex operator+(const Complex &b) const {
return {x + b.x, y + b.y};
}
Complex operator-(const Complex &b) const {
return {x - b.x, y - b.y};
}
Complex operator*(const Complex &b) const {
return {x * b.x - y * b.y, x * b.y + y * b.x};
}
};
int n,m; // 两个多项式的次数
Complex a[maxn*3], b[maxn*3]; // 存储多项式的系数
int pos[maxn*3]; // 定义位置数组,用于FFT中的位置交换
void FFT(Complex*A, int len, int type);
int main(){
int x;pos[0] = 0;
int maxLen = 1, l = 0; // maxLen为FFT的长度,l为log2(maxLen)
scanf("%d", &n);
while(maxLen < n){
maxLen<<=1;
l++;
}
for(int i = 0;i<n;i++){ // 第一个多项式的系数
scanf("%d",&a[i].x);
}
for(int i = 0;i<n;i++){ // 求最后交换的位置(奇数特殊处理)
pos[i] = (pos[i>>1]>>1)|((i&1)<<(l-1));
// 计算每个索引i的位逆序位置(将一个数的二进制位顺序颠倒011->110)
// i>>1 将i的二进制位右移一位,即去掉最低位
// pos[i>>1]>>1 取i的前面所有位(去掉最低位)的位逆序,然后再右移一位
// (i&1)<<(l-1) 取i的最低位,并将其左移到最高位的位置
// 通过|操作将两部分合并,得到i的位逆序
}
FFT(a,maxLen,1);
for(int i=0; i<n; i++){
printf("%d ", a[i].x);
}
printf("\n");
return 0;
}
// A为输入数组,len为长度,type为1表示DFT,-1表示IDFT
void FFT(Complex*A, int len, int type){
for(int i=0; i<len; i++){//将数组A中的元素按照位逆序的位置进行交换
if(i<pos[i])// 如果i已经小于其逆序位置pos[i],则说明这一对已经交换过
swap(A[i], A[pos[i]]);//保证每对只交换一次
}
}
高精度乘法
#include <iostream>
#include<bits/stdc++.h>
using namespace std;
const int maxn = 1000000 + 7;
#define PI acos(-1)
struct Complex {
double x, y; // 实部和虚部
Complex operator+(const Complex &b) const {
return {x + b.x, y + b.y};
}
Complex operator-(const Complex &b) const {
return {x - b.x, y - b.y};
}
Complex operator*(const Complex &b) const {
return {x * b.x - y * b.y, x * b.y + y * b.x};
}
};
int n,m; // 两个多项式的次数
Complex a[maxn*3], b[maxn*3]; // 存储多项式的系数
long long ans[maxn*3];
int pos[maxn*3]; // 定义位置数组,用于FFT中的位置交换
void FFT(Complex*A, int len, int type);
int main(){
int t;
scanf("%d", &t);
while(t--){
int x;pos[0] = 0;
int maxLen = 1, l = 0; // maxLen为FFT的长度,l为log2(maxLen)
char str1[maxn], str2[maxn];
scanf(" %s %s", str1, str2); // 读取两个大数
n = strlen(str1);
m = strlen(str2);
while(maxLen < n+m+1){
maxLen<<=1;
l++;
}
for(int i=0; i<=maxLen; i++){
a[i].y = a[i].x = b[i].y = b[i].x = ans[i] = 0;
}
for(int i = 0; i < n; i++) { // 将第一个大数的字符转换为数字,并倒序存储
a[i].x = str1[n - i - 1] - '0';
}
for(int i = 0; i < m; i++) {
b[i].x = str2[m - i - 1] - '0';
}
for(int i = 0;i<maxLen;i++){ // 求最后交换的位置(奇数特殊处理)
pos[i] = (pos[i>>1]>>1)|((i&1)<<(l-1));
// 计算每个索引i的位逆序位置(将一个数的二进制位顺序颠倒011->110)
// i>>1 将i的二进制位右移一位,即去掉最低位
// pos[i>>1]>>1 取i的前面所有位(去掉最低位)的位逆序,然后再右移一位
// (i&1)<<(l-1) 取i的最低位,并将其左移到最高位的位置
// 通过|操作将两部分合并,得到i的位逆序
}
FFT(a,maxLen,1);
FFT(b,maxLen,1);
for(int i = 0;i<maxLen;i++)
a[i] = a[i]*b[i];
FFT(a,maxLen,-1); // 对结果进行IDFT
for (int i = 0; i < maxLen; i++){
ans[i] += round(a[i].x);
ans[i + 1] += ans[i] / 10; // 如果是8进制就换成8
ans[i] %= 10; // 如果是8进制就换成8
}
int t1 = maxLen;
while (ans[t1] == 0 && t1 > 0)
t1--; // 去除结果数组末尾的零
while (t1 >= 0)
printf("%lld", ans[t1--]);
cout << endl;
}
return 0;
}
// A为输入数组,len为长度,type为1表示DFT,-1表示IDFT
void FFT(Complex*A, int len, int type){
for(int i=0; i<len; i++){//将数组A中的元素按照位逆序的位置进行交换
if(i<pos[i])// 如果i已经小于其逆序位置pos[i],则说明这一对已经交换过
swap(A[i], A[pos[i]]);//保证每对只交换一次
}
for(int L=2; L<=len; L<<=1){//循环合并的区间长度
int HLen = L/2;//区间的一半
Complex Wn = {cos(2.0*PI/L), type*sin(2.0*PI/L)}; // 计算单位根
for(int R=0; R<len; R+=L){//每个小区间的起点
Complex w = {1,0}; // 初始化旋转因子
for(int k=0; k<HLen; k++, w=w*Wn){//求该区间下的值
Complex Buf = A[R+k];//蝴蝶操作,去掉odd和even数组,使变化原地进行
A[R+k] = A[R+k] + w*A[R+k+HLen];
A[R+k+HLen] = Buf - w*A[R+k+HLen];
}
}
}
if (type == -1) { // 归一化
for (int i = 0; i < len; i++) {
A[i].x /= len;
A[i].y /= len;
}
}
}
最大公约数:欧几里得算法
int euclid(int a, int b){
if(b == 0){
return a;
}else{
return euclid(b, a%b);
}
}
欧几里得算法的扩展形式
// 法1
#include <bits/stdc++.h>
using namespace std;
int d, x, y;
void extendedEuclid(int a, int b){
if(b == 0){
d = a, x = 1, y = 0;
}else{
extendedEuclid(b, a%b);
int tempX = x;
x = y, y = tempX-(int)floor(a/b)*y;
}
}
int main() {
int a, b;
scanf("%d%d", &a, &b);
extendedEuclid(a, b);
printf("%d = gcd(%d, %d) = %d*%d+%d*%d", d, a, b, a, x, b, y);
return 0;
}
同余方程
- 通解形式:线性同余方程
ax ≡ b (mod m)的通解可以表示为x = x0 + km/d,其中x0是一个特解,k是任意整数,d = gcd(a, m)。 - 遍历所有解:解的周期性为
d,我们可以通过遍历k从0到d-1来找到所有可能的解。
// 计算同余方程的所有解
int f(long long a,long long b,long long m){
extendedEuclid(a,m);
if(b%d) // 同余方程有解的前提是b是d(a和m的最大公约数的倍数)
return -1;//无解
x=x*(b/d)%m; // 一个特解
for(int i=1; i<=d; i++){ // 遍历所有解的可能
long long tempAns = (x+(i-1)*m/d)%m;
while(tempAns<0){ // 确保解为正数
tempAns += m;
}
if(tempAns < ans){ // 更新解为最小的解
ans = tempAns;
}
}
printf("%lld", ans);
}
字符串匹配
Rabin-Karp算法 双哈希
预处理时间
#include<iostream>
#include<string>
using namespace std;
void Rabin_Karp_search(const string &T, const string &P, int d, int q1, int q2);
int main() {
string T = "Rabin–Karp string search algorithm: Rabin-Karp"; // 文本字符串
string P = "Rabin"; // 模式字符串
int q1 = 101; // 第一个质数,用于取模运算
int q2 = 103; // 第二个质数,用于取模运算
int d = 52; // a到z 大小写
Rabin_Karp_search(T, P, d, q1, q2);
return 0;
}
// T文本字符串 P模式字符串 字符集的大小 两个用于取模运算的质数
void Rabin_Karp_search(const string &T, const string &P, int d, int q1, int q2){
int m = P.length(); // 模式字符串的长度
int n = T.length(); // 文本字符串的长度
int i, j;
int p1 = 0, p2 = 0; // 模式字符串的双哈希值
int t1 = 0, t2 = 0; // 文本字符串的双哈希值
int h1 = 1, h2 = 1; // 用于计算哈希值的基数
// h的值将是"d的(m-1)次方对q取模"
for (i = 0; i < m-1; i++){
h1 = (h1*d)%q1;
h2 = (h2*d)%q2;
}
// 计算模式字符串和文本字符串第一个窗口的总哈希值
for (i = 0; i < m; i++) {
p1 = (d*p1 + P[i])%q1;
p2 = (d*p2 + P[i])%q2;
t1 = (d*t1 + T[i])%q1;
t2 = (d*t2 + T[i])%q2;
}
// 逐个将模式字符串在文本字符串上滑动
for (i = 0; i <= n - m; i++) {
// 检查当前窗口的文本字符串和模式字符串的双哈希值
// 如果双哈希值匹配,则逐个字符检查
if ( p1 == t1 && p2 == t2 ) {
/* 逐个字符检查 */ for (j = 0; j < m; j++)
if (T[i+j] != P[j])
break;
if (j == m) // 如果哈希值匹配且字符也完全匹配
cout<<"Pattern found at index :"<<i<<"\n";
}
// 为下一个窗口的文本字符串计算哈希值:移除首位数字,添加末位数字
if ( i < n-m ){
t1 = (d*(t1 - T[i]*h1) + T[i+m])%q1;
t2 = (d*(t2 - T[i]*h2) + T[i+m])%q2;
// 如果t为负值,则将其转换为正值
if(t1 < 0)
t1 = (t1 + q1);
if(t2 < 0)
t2 = (t2 + q2);
}
}
}
字符匹配有限自动机
#include <bits/stdc++.h>
using namespace std;
#include <string>
#define total_chars 256 // 字符集的总数,通常是256(ASCII字符集大小)
#define trans_func(i, j) (trans_func[(i) * (m+1) + (j)])
// 定义转换函数的宏,用于访问转换表
void transition(int* trans_func, string &pattern);
void FSA(string &pattern, string &text);
int main(){
string pattern = "abc"; // 模式字符串
string text = "abcabcdefghabc"; // 文本字符串
FSA(pattern, text);
}
void FSA(string &pattern, string &text) {
int m = pattern.length();
int n = text.length();
int* trans_func = new int[total_chars * m]; // 分配转换表的空间
transition(trans_func, pattern); // 构建转换表
int q = 0; // 状态机的当前状态
for (int i = 0; i < n; i++) {
q = trans_func(text[i], q); // 根据当前字符和状态更新状态
if (q == m) { // 如果达到最终状态(模式匹配成功)
printf("Pattern found at index :%d ", i-m+1);
q = 0; // 重置状态
}
}
// 输出一个表格,i,j表示如果第j个字符是i,会匹配跳转到哪里
long long ans = 0;
for(int j=0; j<total_chars; j++){
for (int i = (m+1)*j+0; i < (m+1)*j+m+1; i++) {
// printf("%d ", trans_func[i]);
ans += trans_func[i];
}
// puts("");
}
// printf("%lld", ans);
}
void transition(int* trans_func, string &pattern) {
int m = pattern.length();
for (int i = 0; i < total_chars; i++) { // 初始化转换表的第一列
if (i == pattern[0]) { // 如果字符匹配模式的第一个字符
trans_func(i, 0) = 1;
} else {
trans_func(i, 0) = 0;
}
}
int X = 0; // 失败函数,记录了pattern的前j个字符中最长相同前后缀
// 例如,对于模式字符串"ABABAC",其部分匹配表为[0, 0, 1, 2, 3, 0]。
for (int j = 1; j < m; j++) { // 构建转换表的其余部分
for (int i = 0; i < total_chars; i++) {
if (pattern[j] == i) { // 如果字符匹配模式的当前字符
trans_func(i, j) = j + 1; // 状态转移到下一个
} else {
trans_func(i, j) = trans_func(i, X);
}
}
X = trans_func(pattern[j], X);
}
// 转换表的最后一列
for (int i = 0; i < total_chars; i++) {
if (pattern[X] == i) {
trans_func(i, m) = X + 1;
} else {
trans_func(i, m) = trans_func(i, X);
}
}
}
KMP算法
时间复杂度
#include <iostream>
#include <vector>
#include <string>
using namespace std;
vector<int> prefix(string str);
int main(){
string text;
string key;
cin >> text; // 文本字符串
cin >> key; // 模式字符串
int kl = key.length();
vector<int> kmp = prefix(key); // 计算模式字符串的KMP前缀表即π
int k = 0;
for(int i = 0; i < text.length(); i++){
// 当匹配长度大于0且当前字符不匹配时,回退到前缀表的相应位置
while (k && key[k] != text[i])
k = kmp[k - 1];
// 如果当前字符匹配,增加匹配长度
if(text[i] == key[k])
k++;
// 如果匹配长度等于模式字符串的长度,输出匹配的位置
if(k == kl)
cout << i - k + 2 << "\n";
}
for(auto x: kmp) // 输出KMP前缀表即π的每个值
cout << x << " ";
return 0;
}
vector<int> prefix(string str){
int l = (int) str.length();
vector<int> pre(l); // 创建一个长度为l的向量来存储前缀表
for(int i = 1; i < l; i++){
int j = pre[i - 1]; // i-1的最大的前缀==后缀
// 如果 j>0(防止死循环) 且当前字符与前缀的最后一个字符不匹配时,回退j的值
while (j && str[j] != str[i])
j = pre[j - 1]; // ababaababab
if(str[j] == str[i]) // 如果当前字符与前缀的最后一个字符匹配,增加j的值
j++;
pre[i] = j; // 设置当前字符的前缀表值
}
return pre;
}
确定连续线段是向左转还是向右转
已知
- 结果
- 结果
- 结果
struct dot{
int x, y;
};
int direction(dot pi, dot pj, dot pk){
// 计算向量pi-pj和向量pk-pj的叉积,用于判断方向
// 如果<0,则pipj pjpk在pj左转
// 如果>0,则pipj pjpk在pj右转
// 否则三者共线
return ((pk.x-pi.x)*(pj.y-pi.y)-(pk.y-pi.y)*(pj.x-pi.x));
}
判定两条线是否相交
struct dot{
int x, y;
};
// 计算向量pi-pj和向量pk-pj的叉积,用于判断方向
int direction(dot pi, dot pj, dot pk){
return ((pk.x-pi.x)*(pj.y-pi.y)-(pk.y-pi.y)*(pj.x-pi.x));
}
bool onSegment(dot pi, dot pj, dot pk){ // 判断点pk是否在线段pi-pj上
if(min(pi.x, pj.x) <= pk.x && max(pi.x, pj.x) >= pk.x &&
// 判断pk的x坐标是否在pi和pj的x坐标之间
min(pi.y, pj.y) <= pk.y && max(pi.y, pj.y) >= pk.y){
// 判断pk的y坐标是否在pi和pj的y坐标之间
return true;
}
return false;
}
//线段p1p2与p3p4是否相交
bool segmentsIntersect(dot p1, dot p2, dot p3, dot p4){
int d1 = direction(p3, p4, p1);
int d2 = direction(p3, p4, p2);
int d3 = direction(p1, p2, p3);
int d4 = direction(p1, p2, p4);
if(((d1>0 && d2<0)||(d1<0 && d2>0)) && ((d3>0 && d4<0)||(d3<0 && d4>0))){
return true; // 如果两线段在彼此的两侧,则相交
}else if(d1 == 0 && onSegment(p3, p4, p1)){
return true; // 如果p1在p3p4上
}else if(d2 == 0 && onSegment(p3, p4, p2)){
return true; // 如果p2在p3p4上
}else if(d3 == 0 && onSegment(p1, p2, p3)){
return true; // 如果p3在p1p2上
}else if(d4 == 0 && onSegment(p1, p2, p4)){
return true; // 如果p4在p1p2上
}else{
return false;
}
}
确定任意一对线段是否相交
#include <iostream>
#include <algorithm>
#include <vector>
using namespace std;
struct Point {
int x, y;
Point operator+(const Point &b) const {
return {x + b.x, y + b.y};
}
Point operator-(const Point &b) const {
return {x - b.x, y - b.y};
}
// 重载乘法运算符,用于点与整数相乘
Point operator*(const int &b) const {
return {x * b, y * b};
}
// 重载异或运算符,用于计算两个向量的叉积
int operator^(const Point &b) const {
return x * b.y - y * b.x;
}
};
struct Line { // 定义线段结构体
Point p; // 线段的起点
Point q; // 线段的终点
};
vector<Line> lines;
int sgn(int x);
bool intersect(Line l1, Line l2);
bool onSegment(Point point, Line line);
int main() {
int n, cnt = 0;
cin >> n; // 线段数量
int x1, y1, x2, y2;
for (int i = 0; i < n; i++) {
cin >> x1 >> y1 >> x2 >> y2;
lines.push_back({{x1, y1}, {x2, y2}}); // 将线段添加到数组中
}
for (int i = 0; i < n; i++) // 双重循环遍历所有线段对,判断是否相交
for (int j = 0; j < i; j++)
if (intersect(lines[i], lines[j]))
cnt++; // 如果相交,则计数器加一
cout << cnt; // 输出相交线段对数
return 0;
}
int sgn(int x) {
if (x < 0) return -1;
if (x > 0) return 1;
return 0;
}
bool intersect(Line l1, Line l2) {
int d1 = sgn((l1.q - l1.p) ^ (l2.p - l1.p));
int d2 = sgn((l1.q - l1.p) ^ (l2.q - l1.p));
int d3 = sgn((l2.q - l2.p) ^ (l1.p - l2.p));
int d4 = sgn((l2.q - l2.p) ^ (l1.q - l2.p));
// 如果两线段在彼此的两侧,则相交
if (d1 * d2 < 0 && d3 * d4 < 0)
return true;
// 其中一个端点在另一条线段上,也视为相交
if (d1 == 0 && onSegment(l2.p, l1))
return true;
if (d2 == 0 && onSegment(l2.q, l1))
return true;
if (d3 == 0 && onSegment(l1.p, l2))
return true;
if (d4 == 0 && onSegment(l1.q, l2))
return true;
return false;
}
bool onSegment(Point point, Line line) { // 判断点是否在线段上
if (point.x >= min(line.p.x, line.q.x) &&
point.x <= max(line.p.x, line.q.x) &&
point.y >= min(line.p.y, line.q.y) &&
point.y <= max(line.p.y, line.q.y))
return true;
return false;
}
寻找凸包(Graham扫描法)
#include <iostream>
#include <algorithm>
#include <cmath>
#include <cstdio>
using namespace std;
const int MAX = 200005;
const double eps = 1e-7;
struct Point {
double x, y;
Point operator+(const Point &b) const {
return {x + b.x, y + b.y};
}
Point operator-(const Point &b) const {
return {x - b.x, y - b.y};
}
// 重载异或运算符,用于计算两个向量的叉积
double operator^(const Point &b) const {
return x * b.y - y * b.x;
}
bool operator<(const Point &b) const {
if (x != b.x)
return x < b.x;
return y < b.y;
}
};
Point p[MAX]; // 存储所有点的数组
Point s[MAX]; // 用于构建凸包的栈
int top; // 栈顶指针
void selMin(int n);
int cmp(Point a, Point b);
bool equal(double a, double b);
double dis(Point a, Point b);
void graham(int n);
double s_sqr(Point a, Point b, Point c);
double diameter();
int main() {
int n;
cin >> n; // 点的数量
for (int i = 0; i < n; i++)
cin >> p[i].x >> p[i].y; // 每个点的坐标
selMin(n); // 选择最小的点作为起点
sort(p + 1, p + n, cmp); // 根据极角排序
graham(n); // 执行Graham扫描算法构建凸包,凸包中的点在数组s中
printf("%.6f", sqrt(diameter())) ; // 输出凸包的直径(开方后)
return 0;
}
void selMin(int n) {
Point Min = p[0]; // 初始化最小点
int IDMin = 0; // 最小点的索引
for (int i = 0; i < n; i++)
if (p[i] < Min) { // 如果找到更小的点
Min = p[i];
IDMin = i;
}
swap(p[0], p[IDMin]); // 将最小点交换到数组第一个位置
}
int cmp(Point a, Point b) {
double x = (a - p[0]) ^ (b - p[0]); // 计算相对于起点的叉积
if (x > 0) // 点a的极角大于点b的极角
return 1;
if (equal(x, 0) && (dis(a, p[0]) < dis(b, p[0])))
// 如点a和点b具有相同的极角且a离起点更近
return 1;
return 0;
}
double dis(Point a, Point b) { // 计算点a到点b距离
double x = a.x - b.x;
double y = a.y - b.y;
return x * x + y * y;
}
void graham(int n) { // n点的个数
top = 1; // 初始化栈顶指针
s[0] = p[0]; // 起点入栈
s[1] = p[1]; // 第二个点入栈
for (int i = 2; i < n; i++) {
// 如果当前点与栈顶两个点构成的向量方向不是逆时针,则栈顶点出栈
while (top > 1 && ((p[i] - s[top]) ^ (s[top - 1] - s[top])) <= 0)
top--;
s[++top] = p[i]; // 当前点入栈
}
}
double s_sqr(Point a, Point b, Point c) {// 计算三角形abc的面积平方
return fabs((a - b) ^ (c - b));
}
double diameter() {// 计算凸包的直径(即最远点对距离)
double diam = 0;
int j = 2; // 初始化另一个点的索引
s[++top] = s[0]; // 将凸包的起点再次加入栈中,以便于计算
if (top < 3) // 如果凸包中的点少于3个,直接返回这两点间的距离
return dis(s[0], s[1]);
for (int i = 0; i < top - 1; i++) {
// 旋转卡壳算法,寻找以s[i]和s[i+1]为基线的最远点s[j]
while (s_sqr(s[i], s[i + 1], s[j]) < s_sqr(s[i], s[i + 1], s[(j + 1) % top]))
j = (j + 1) % top; // 更新j的值,取模是为了循环遍历凸包上的点
// 更新直径,取当前基线与最远点的最大距离
diam = max(diam, max(dis(s[i], s[j]), dis(s[i + 1], s[j])));
}
return diam;
}
bool equal(double a, double b){// 判断两个浮点数是否相等
return fabs(a - b) < eps;
}
点、向量相关
//向量、点结构定义和操作
struct point{
double x,y;
//求点所在的象限
int quad(){
if(x>0&&y>=0) return 1;if(x<=0&&y>0) return 2;
if(x<0&&y<=0) return 3;if(x>=0&&y<0) return 4;
}
};
//以x升序排列,其次以y升序排列
bool sortXupYup(point u,point v){
if(u.x!=v.x) return u.x<v.x;
else return u.y<v.y;
}
//以y升序排列,其次以x升序排列
bool sortYupXup(point u,point v){
if(u.y!=v.y) return u.y<v.y;
else return u.x<v.x;
}
//对点进行极角排序
bool sortPointAngle(point a,point b){
if(a.quad()!=b.quad()) return a.quad()<b.quad();
return (a^b)>0;
}
//向量取模
double norm(point u){
return sqrt(u.x*u.x+u.y*u.y);
}
//点到点的距离
double disPointPoint(point u,point v){
return sqrt((u.x-v.x)*(u.x-v.x)+(u.y-v.y)*(u.y-v.y));
}
//向量的旋转
point SpinPoint(point u,double zhita){ // 向量u绕原点旋转zhita角
//逆时针旋转zhita角
double r=sqrt(u.x*u.x+u.y*u.y);
double sinphi=u.y/r,cosinphi=u.x/r; // 向量u的原始角度的正弦和余弦值
double sinr=sinphi*cos(zhita)+cosinphi*sin(zhita); // 旋转后角度的正弦值
double cosr=cosinphi*cos(zhita)-sinphi*sin(zhita); // 旋转后角度的余弦值
point v;
v.x=r*cosr;v.y=r*sinr;
return v;
}
// 求一组点中的最小距离 a为点的数组 size为数组大小 u,v表示这两个点 返回最小距离
//分治法的入口,分治前需要排序
double mindisset1(point* a,int size,int &u,int &v){
//函数起始入口
double minn=1e18; // 初始化最小距离为一个非常大的数
sort(a+1,a+1+size,sortXupYup); // 对点集按照x坐标升序,y坐标升序进行排序
Nearestpoint(a,1,size,u,v,minn); // 调用分治法函数求解最近点对
return minn; // 返回最小距离
}
void Nearestpoint(point *a,int l,int r,int &u,int &v,double &d){
/*a点的数组 l左边界 r右边界 uv最近的两个点的index d最小距离
应当注意距离的定义形式,如果为平方的形式, 则代码中绝对值的部分也应当改为平方
*/ if(l==r) return ; // 如果只有一个点,则没有最近点对,直接返回
if(l+1==r) { // 如果只有两个点,直接计算它们之间的距离
if(disPointPoint(a[l],a[r])<d) { // 这两个点的距离小于当前最小距离d
d = disPointPoint(a[l], a[r]); // 更新最小距离
u = l, v = r; // 更新最近点对的索引
}
return ;
}
int mid=l+r>>1,m=0;
Nearestpoint(a,l,mid,u,v,d),Nearestpoint(a,mid+1,r,u,v,d);
point b[r-l+10]; // 定义一个临时数组,用于存储中间区域附近的点
for(int i=l;i<=r;i++){
if(abs(a[i].x-a[mid].x)<d) // 如果点a[i]到中间垂线的距离小于当前最小距离d
b[++m]=a[i]; // 将点a[i]加入临时数组
}
sort(b+1,b+1+m,sortYupXup); // 按照y坐标升序,x坐标升序对临时数组进行排序
for(int i=1;i<=m;i++){
for(int j=i+1;j<=m&&abs(b[i].y-b[j].y)<d;j++){ // 在临时数组中查找最近点对
if(d>disPointPoint(b[i],b[j])) { // 找到更近的点对
d = disPointPoint(b[i], b[j]); // 更新最小距离
u = i, v = j; // 更新最近点对的索引
}
}
}
return ;
}
maybe凸包相关
//余弦定理 计算cosC ab为邻边 c为对边
double cosinesLaw(double a,double b,double c){
return (a*a+b*b-c*c)/(2*a*b);
}
//求三角形面积
double triarea(point u,point v,point w){
//叉积方法
return abs((v-u)^(w-u))/2.0;
}
double triarea(double a,double b,double c){ // abc为三角形边长
//海伦公式
double p=(a+b+c)/2;
return sqrt(p*(p-a)*(p-b)*(p-c));
}
//求多边形的面积
double polygonArea(point *u,int size){
double area=0;
point begin=u[0];
/*
由第一个点起始的顺序叉积,其中,点可以无序,
面积值为边之间连线的封闭部分,叉积能够计算容斥部分
*/ for(int i=2;i<size;i++) area+=((u[i-1]-begin)^(u[i]-begin))/2;
return area;
}
//判断一个点是否在多边形内 u需要判断的点 v多边形顶点数组 size多边形顶点数量
// 多边形的顶点按照顺时针或逆时针顺序排列(先调用凸包中的sort和cmp按照极角给点排序)
bool Isinside(point u,point *v,int size){
// 检查点u是否在以v[1]为起点的两条边界线的同一侧,如果不在同一侧,则点u不在多边形内
if(((v[size]-v[1])^(u-v[1]))>0||((v[2]-v[1])^(u-v[1]))<0) return false;
int l=2,r=size; // 初始化二分查找的左右边界
while(l<=r){ // 进行二分查找,找到点u在多边形边界上的位置
int mid=l+r>>1;
// 判断点u相对于以v[1]为起点的边界线的位置
if(((v[mid]-v[1])^(u-v[1]))<0) l=mid+1; // 点u在边界线的左侧,调整左边界
else r=mid-1; // 点u在边界线的右侧或在线上,调整右边界
}
// 检查点u是否在以v[r]和v[l]为端点的边界线的同一侧或线上,如果是,则点u在多边形内
if(((v[r]-v[l])^(u-v[l]))>=0) return true;
return false;
}
直线相关
//直线结构定义和直线的极角排序
struct line{
//ax+by+c=0
double a,b,c;
//u为直线上一点,v为方向向量
point u,v;
line(){}
//两点确定的直线方程
line(point p,point q){
a=p.y-q.y;b=q.x-p.x;c=p.x*q.y-q.x*p.y;// 根据两点式求直线方程系数
//保证u、v两点逆时针排列
if((p^q)<0) swap(p,q);
u=p;v=q-p;
}
};
//对直线进行极角排序 极角是指直线方向向量与x轴正方向的夹角
// 调用:sort(lines.begin(), lines.end(), sortLineAngle);
bool sortLineAngle(line a,line b){
// 首先比较两条直线的方向向量所在象限
if(a.v.quad()!=b.v.quad()) return a.v.quad()<b.v.quad();
// 如果方向向量在同一象限,则比较它们的叉积
else return (a.v^b.v)==0?(a.v^(a.u-b.u))>0:(a.v^b.v)>0;
}
//点、线运算
//点u到直线l的距离
double disPointLine(point u,line l){
double length;
length = abs(l.a*u.x+l.b*u.y+l.c)/(sqrt(l.a*l.a+l.b*l.b));
return length;
}
//点u在直线l上的投影点 返回投影点v
point proPointLine(point u,line l){
point v;
// 计算投影点坐标的参数t
double t=(-u.x*l.a-u.y*l.b-l.c)/(l.a*l.a+l.b*l.b);
// 根据参数t和直线方程计算投影点坐标
v.x=u.x+l.a*t;
v.y=u.y+l.b*t;
return v;
}
// 点到线段的距离 点u到线段vw的距离 返回点到线段的距离
double disPointSeg(point u, point v, point w) {
// d1是向量uv在向量vw上的投影长度的平方
long long d1 = (u.x - v.x) * (w.x - v.x) + (u.y - v.y) * (w.y - v.y);
// 如果投影长度小于等于0,说明点u在v点或v点延长线上,直接计算uv的距离
if (d1 <= 0.0) return sqrt((u.x - v.x) * (u.x - v.x) + (u.y - v.y) * (u.y - v.y));
// d2是向量vw的长度的平方
long long d2 = (v.x - w.x) * (v.x - w.x) + (v.y - w.y) * (v.y - w.y);
// 如果投影长度大于等于d2,说明点u在w点或w点延长线上,直接计算uw的距离
if (d1 >= d2) return sqrt((u.x - w.x) * (u.x - w.x) + (u.y - w.y) * (u.y - w.y));
// 计算点u在vw上的投影点坐标
double r = 1.0 * d1 / d2;
double px = v.x + (w.x - v.x) * r;
double py = v.y + (w.y - v.y) * r;
// 返回点u到其投影点的距离
return sqrt((u.x - px) * (u.x - px) + (u.y - py) * (u.y - py));
}
// 求两直线的交点 线段l1l2 返回交点p
point itsLineLine(line l1, line l2) {
point p;
// k是两直线方程系数的行列式,用于判断两直线是否平行
double k = l1.a * l2.b - l1.b * l2.a;
// 计算交点坐标,使用克莱姆法则解线性方程组
p.x = -(l1.c * l2.b - l1.b * l2.c) / k;
p.y = -(l1.a * l2.c - l1.c * l2.a) / k;
return p;
}
// 计算多个半平面的交集,并返回交集区域的多边形顶点
const line bd[4] = {// 定义四个边界直线,形成一个无限大的矩形,用于限制半平面的范围
line(point{-INF,-INF},point{INF,-INF}),line(point{INF,-INF},point{INF,INF}),
line(point{INF,INF},point{-INF,INF}),line(point{-INF,INF},point{-INF,-INF}),
};
vector<point> HalfPlaneInter(vector<line> k){ // 计算多个半平面的交集,返回交集的多边形顶点
// 将边界直线添加到半平面直线集合中
for (int i = 0; i < 4; i++) k.push_back(bd[i]);
// 按照直线的极角进行排序
sort(k.begin(), k.end(), sortLineAngle);
deque<line> q; // 存储当前考虑的直线
deque<point> c; // 存储交点
vector<point> ans; // 存储最终的多边形顶点
int m = 0; // 用于去除重复的直线
// 去除方向向量相同的直线
for (int i = 1; i < k.size(); i++) if ((k[m].v ^ k[i].v) != 0) k[++m] = k[i];
// 初始化队列
q.push_back(k[0]);
// 遍历所有直线,构建半平面交集
for (int i = 1; i <= m; i++) {
// 维护队列,确保队列中的直线形成的多边形是有效的
while (c.size() && ((c.back() - k[i].u) ^ k[i].v) >= 0) {
q.pop_back();
c.pop_back();
}
while (c.size() && ((c.front() - k[i].u) ^ k[i].v) >= 0) {
q.pop_front();
c.pop_front();
}
// 计算当前直线与队列中最后一条直线的交点,并添加到队列中
c.push_back(itsLineLine(k[i], q.back()));
q.push_back(k[i]);
}
// 清理队列中的无效直线和交点
while (c.size() && ((c.back() - q.front().u) ^ q.front().v) >= 0) {
q.pop_back();
c.pop_back();
}
// 将交点添加到答案中
while (c.size()) {
ans.push_back(c.front());
c.pop_front();
}
// 如果队列中有多于一条直线,添加最后两条直线的交点
if (q.size() > 1) ans.push_back(itsLineLine(q.front(), q.back()));
return ans;
}
圆相关
//圆结构
struct circle{
//圆心
point cc;
//半径
double radius;
};
//求三点uvw所确定的圆c
circle concyclic(point u, point v, point w) {
circle c;
point o;
// 计算圆心坐标的系数k
double k = 2 * (v.x - u.x) * (w.y - v.y) - 2 * (v.y - u.y) * (w.x - v.x);
// 计算圆心o的x坐标
o.x = (w.y - v.y) * (v.x * v.x + v.y * v.y - u.x * u.x - u.y * u.y) - (v.y - u.y) * (w.x * w.x + w.y * w.y - v.x * v.x - v.y * v.y);
// 计算圆心o的y坐标
o.y = (v.x - u.x) * (w.x * w.x + w.y * w.y - v.x * v.x - v.y * v.y) - (w.x - v.x) * (v.x * v.x + v.y * v.y - u.x * u.x - u.y * u.y);
o.x /= k; o.y /= k; // 除以系数k得到圆心坐标
c.cc = o; // 设置圆心
c.radius = disPointPoint(o, u); // 计算半径并设置
return c;
}
//求圆c与直线l的交点ans
vector<point> itsStrCir(line l, circle c) {
double k = l.u * l.v; // 计算直线与圆心的向量点积
double a = norm(l.u), b = norm(l.v); // 计算直线向量的模的平方
double r = c.radius; // 圆的半径
double d = k * k - b * b * (a * a - r * r); // 计算判别式
vector<point> ans;
// 判别式为0,有一个交点
if (d == 0) ans.push_back(l.u + l.v * (-k / (b * b)));
// 判别式大于0,有两个交点
else {
ans.push_back(l.u + l.v * ((-k + d) / (b * b)));
ans.push_back(l.u + l.v * ((-k - d) / (b * b)));
}
// 返回交点集合
return ans;
}
// 求两圆c1c2的交点ans
vector<point> itsCirCir(circle c1, circle c2) {
vector<point> ans;
point o1 = c1.cc, o2 = c2.cc; // 圆心o1和o2
point a = o2 - o1; // 向量a从o1指向o2
point b; // 向量b垂直于a
b.x = a.y; b.y = -a.x;
double r1 = c1.radius, r2 = c2.radius; // 两圆的半径
double d = disPointPoint(o1, o2); // 圆心距离
double S = triarea(r1, r2, d); // 两圆半径和圆心距离构成的三角形面积
double h = 2 * S / d; // 交点连线的中垂线到圆心连线的距离
double t = sqrt(r1 * r1 - h * h);
if (r1 * r1 + d * d < r2 * r2) t = -t; // 如果两圆内含,调整t的符号
// 计算交点
if (h == 0) {
// 如果h为0,两圆相切,只有一个交点
ans.push_back(o1 + a * t / norm(a));
} else {
// 否则有两组交点
ans.push_back(o1 + a * t / norm(a) + b * h / norm(b));
ans.push_back(o1 + a * t / norm(a) - b * h / norm(b));
}
return ans;
}
// 求一点u与圆c的切线ans
vector<line> tlPointCircle(point u, circle c) {
vector<line> ans;
// 构造一个辅助圆,圆心为u和c.cc的中点,半径为u到c.cc距离的一半
circle o;
o.cc = (c.cc + u) / 2;
o.radius = disPointPoint(c.cc, u) / 2;
// 求辅助圆与原圆的交点
vector<point> p = itsCirCir(o, c);
// 如果只有一个交点,则切线只有一条
if (p.size() == 1) {
point v;
v.x = (u - c.cc).y; v.y = -(u - c.cc).x;
ans.push_back(line(u, u + v));
}
// 如果有两个交点,则切线有两条
if (p.size() == 2) {
ans.push_back(line(p[0], u));
ans.push_back(line(p[1], u));
}
return ans;
}
// 求两圆c1c2的公切线ans
vector<line> comTangent(circle c1, circle c2) {
vector<line> ans, q;
int r1 = c1.radius, r2 = c2.radius; // 两圆的半径
int d = disPointPoint(c1.cc, c2.cc); // 两圆心之间的距离
point u, v, a = c2.cc - c1.cc, t; // 向量a从c1的圆心指向c2的圆心
// 如果两圆半径相等,则有两条外公切线和两条内公切线
if (r1 == r2) {
u = c1.cc - c2.cc;
v.x = u.y; v.y = -u.x; // v是u的垂直向量
// 添加两条外公切线
ans.push_back(line(c1.cc + v * r1 / norm(v), c1.cc + v * r1 / norm(v) + u));
ans.push_back(line(c1.cc - v * r1 / norm(v), c1.cc - v * r1 / norm(v) + u));
} else {
// 内侧切线(内公切线)
if (triarea(r1, r2, d) == 0) { // 如果两圆内切
t = c1.cc + a * r1 / r2; // 计算切点
q = tlPointCircle(t, c1); // 求切线
while (q.size()) { ans.push_back(q.back()); q.pop_back(); } // 添加到答案中
}
// 外侧切线(外公切线)
t = c1.cc + a * r1 / (r1 - r2); // 计算切点
q = tlPointCircle(t, c1); // 求切线
while (q.size()) { ans.push_back(q.back()); q.pop_back(); } // 添加到答案中
}
return ans;
}
// 最小圆覆盖 给定点集u和点的数量size,求最小的圆c能够覆盖所有点
circle Smallestcir(point *u, int size) {
random_shuffle(u + 1, u + 1 + size); // 随机打乱点集
point o = u[1]; // 初始圆心为第一个点
double r = 0; // 初始半径为0
for (int i = 2; i <= size; i++) {
if (disPointPoint(o, u[i]) <= r) continue; // 如果点在当前圆内,跳过
o = (u[i] + u[1]) / 2; // 更新圆心为i和1号点的中点
r = disPointPoint(u[i], u[1]) / 2; // 更新半径为i和1号点距离的一半
for (int j = 2; j < i; j++) {
if (disPointPoint(u[j], o) <= r) continue; // 如果点在当前圆内,跳过
o = (u[i] + u[j]) / 2; // 更新圆心为i和j号点的中点
r = disPointPoint(u[i], u[j]) / 2; // 更新半径为i和j号点距离的一半
for (int k = 1; k < j; k++) {
if (disPointPoint(u[k], o) <= r) continue; // 如果点在当前圆内,跳过
circle c = concyclic(u[i], u[j], u[k]); // 求通过i、j、k三点的圆
o = c.cc; r = c.radius; // 更新圆心和半径
}
}
}
circle c;
c.cc = o; c.radius = r;
return c;
}
快速幂取余
// 快速幂取模函数 计算 (a^b) % m 的结果res
ll fast_pow_mod(ll a, ll b, ll m){
a %= m; // 对a取模,减少后续计算中的数值大小
ll res = 1; // 初始化结果为1(任何数的0次幂都是1)
while (b > 0) { // 当指数b大于0时,进行循环
// 如果b的当前最低位为1,则将当前a乘到结果中
if (b & 1) res = res * a % m;
a = a * a % m; // 将a平方,用于下一轮循环
b >>= 1; // 将b右移一位,相当于除以2
}
return res;
}
快速打质数表
// 生成小于等于n的所有素数列表prime_list
vector<int> generate_prime_list(int n) {
if (n <= 2) // 如果n小于等于2,返回只包含2的列表
return vector<int>{2};
if (n <= 3) // 如果n小于等于3,返回包含2和3的列表
return vector<int>{2, 3};
if (n <= 5) // 如果n小于等于5,返回包含2、3和5的列表
return vector<int>{2, 3, 5};
vector<int> prime_list = {2, 3, 5}; // 初始化素数列表,包含最小的三个素数2、3和5
int i = 1; // 初始化循环变量i
int x;
while (true) {
x = 6 * i + 1; // 计算6i+1,这是除了2和3之外素数的可能形式之一
if (x > n) // 如果x大于n,则不再继续查找
break;
if (is_prime(x, prime_list)) // 如果x是素数,则添加到素数列表中
prime_list.push_back(x);
x = 6 * i + 5; // 计算6i+5,这是除了2和3之外素数的另一种可能形式
if (x > n) // 如果x大于n,则不再继续查找
break;
if (is_prime(x, prime_list)) // 如果x是素数,则添加到素数列表中
prime_list.push_back(x);
i++; // 增加i,用于下一轮计算
}
return prime_list;
}
// 判断一个数x是否为素数,利用已知的素数列表prime_list进行判断
bool is_prime(int x, const vector<int> &prime_list) {
for(auto u: prime_list){ // 遍历素数列表中的每个素数u
if(x % u == 0) // 如果x能被u整除,则x不是素数
return false;
if(u * u > x) // 如果u的平方大于x,则x是素数
return true;
}
return true; // 如果没有找到能整除x的素数,则x是素数
}
单调栈
-
寻找左侧第一个比当前元素大的元素:从左到右遍历元素,构造单调递增栈(从栈顶到栈底递增)
一个元素左侧第一个比它大的元素就是将其「插入单调递增栈」时的栈顶元素。
如果插入时的栈为空,则说明左侧不存在比当前元素大的元素。 -
寻找左侧第一个比当前元素小的元素:从左到右遍历元素,构造单调递减栈(从栈顶到栈底递减)
一个元素左侧第一个比它小的元素就是将其「插入单调递减栈」时的栈顶元素。
如果插入时的栈为空,则说明左侧不存在比当前元素小的元素。 -
寻找右侧第一个比当前元素大的元素:从左到右遍历元素,构造单调递增栈(从栈顶到栈底递增)
一个元素右侧第一个比它大的元素就是将其「弹出单调递增栈」时即将插入的元素。
如果该元素没有被弹出栈,则说明右侧不存在比当前元素大的元素。 -
寻找右侧第一个比当前元素小的元素:从左到右遍历元素,构造单调递减栈(从栈顶到栈底递减)
一个元素右侧第一个比它小的元素就是将其「弹出单调递减栈」时即将插入的元素。
如果该元素没有被弹出栈,则说明右侧不存在比当前元素小的元素。 -
查找 「比当前元素大的元素」 就用 单调递增栈,查找 「比当前元素小的元素」 就用 单调递减栈。
- 从 「左侧」 查找就看 「插入栈」 时的栈顶元素,从 「右侧」 查找就看 「弹出栈」 时即将插入的元素。
#include <cstdio>
#define MAX (300000+10)
int monoIncreaseStack(int height, int id);
void push(long long height, long long id);
long long pop();
struct student{
long long id;
long long height;
long long leftBigId, rightBigId; // 左侧第一个比当前元素的height大的数的id 右侧...
};
struct student stacks[MAX]; // 栈
struct student students[MAX]; // 所有的学生
int Top = -1;// 栈指针
int main() {
int t;
scanf("%d", &t);
while (t--){
int n;
Top = -1;
scanf("%d", &n);
for (int i = 0; i < n; ++i) { // 读取所有height,单调栈处理
long long height;
scanf("%lld", &height);
students[i].height = height;
students[i].id = i;
monoIncreaseStack(height, i);
}
while(Top != -1){
// 现在还在栈里的数的右侧都没有比它大的数
students[stacks[Top].id].rightBigId = n;
pop();
}
}
return 0;
}
int monoIncreaseStack(int height, int id){ // 当前元素大小height index为id
// 弹出所有比当前元素小的元素
while(Top!=-1 && height>=stacks[Top].height){
long long popId = pop();
students[popId].rightBigId = id; // id是popId右侧第一个比它大的元素
}
if(Top == -1){
students[id].leftBigId = -1; // id左侧没有比它大的元素
}else{
students[id].leftBigId = stacks[Top].id;
}
push(height, id); // 入栈
}
void push(long long height, long long id){
stacks[++Top].height = height; // 入栈成功
stacks[Top].id = id;
}
long long pop(){
return stacks[Top--].id; // 出栈成功
}
秦九韶算法/Horner 规则
大数相乘
#include <stdio.h>
#include <string.h>
#define MAX 1000005
char s1[MAX], s2[MAX];
int a1[MAX], a2[MAX], ans[MAX];
int main() {
int n;
scanf("%d", &n);
for(int z=0; z<n; z++){
int i, j, len1, len2;
scanf("%s%s", s1, s2);
len1 = strlen(s1);
len2 = strlen(s2);
for (i = 0; i < len1; i++) { // 转化成数字后逆序存储
a1[i] = s1[len1 - 1 - i] - '0';
}
for (i = 0; i < len2; i++) { // 转化成数字后逆序存储
a2[i] = s2[len2 - 1 - i] - '0';
}
for (i = 0; i < len1; i++) {
for (j = 0; j < len2; j++) {
ans[i + j] += a1[i] * a2[j];
}
}
for (i = 0, j = 0; i < len1 + len2; i++) {
ans[i] += j;
j = ans[i] / 10; // 8进制就把10换成8
ans[i] %= 10; // 8进制就把10换成8
}
int flag = 0;
for (; ans[i] == 0; i--){ //跳过前面的0
if(i<0){ // 大数相乘结果本身就是0
printf("0");
puts("");
flag = 1;
break;
}
}
if(flag == 0){
for (; i >= 0; i--) { // 逆序输出
printf("%d", ans[i]);
ans[i] = 0;
}
puts("");
}
}
return 0;
}
随机数
// 生成0-99的随机数
inline int Rand() {
return rand()%100;
}
模逆元
模逆元:
如果p是一个质数,a是任意整数,且a不是p的倍数,那么a的模逆元可以表示为:
即
long long qmi(long long mom, long long b, long long mod){ // 快速幂函数
long long res = 1;
while(b){
if(b & 1) res = res * mom % mod;
b >>= 1;
mom = mom * mom % mod;
}
return res;
}
x = qmi(a, MOD-2, MOD); //x是a在mod MOD下的逆元
MORE……
- 双指针 left 和 right
